































Abderahman Rejeb a , Alireza Abdollahi b , Karim Rejeb c , Horst Treiblmaier d,
- a Depatman Jesyon ak Lwa, Fakilte Ekonomi, University of Rome Tor Vergata, Via Columbia, 2, Rome 00133, Itali
- b Depatman Administrasyon Biznis, Fakilte Jesyon, Kharazmi University, 1599964511 Tehran, Iran
- c Fakilte Syans nan Bizerte, University of Carthage, Zarzouna, 7021 Bizerte, Tinizi
- d Lekòl Jesyon Entènasyonal, Modul University Vienna, Am Kahlenberg 1, 1190 Vyèn, Otrich
| ENFO ATIK | REZIME |
| Keywords: Dron Dron Agrikilti presizyon Entènèt nan Bagay Bibliometrik | Drones, yo rele tou Veyikil Ayeryen San Pitit (UAV), te temwen yon devlopman remakab nan dènye deseni yo. Nan agrikilti, yo te chanje pratik agrikilti yo lè yo ofri fèmye yo yon gwo ekonomi nan pri efikasite operasyonèl, ak pi bon rentabilité. Pandan deseni ki sot pase yo, sijè a nan dron agrikòl gen atire atansyon akademik remakab. Se poutèt sa, nou fè yon revizyon konplè ki baze sou bibliyometrik pou rezime ak estrikti literati akademik ki egziste deja epi revele tandans rechèch aktyèl yo ak otspo. Nou aplike teknik bibliyometrik epi analize literati ki antoure dron agrikòl pou rezime ak evalye rechèch anvan yo. Analiz nou an endike teledeteksyon, agrikilti presizyon, aprantisaj pwofon, aprantisaj machin, ak Entènèt bagay yo se sijè enpòtan ki gen rapò ak dron agrikòl. Ko-sitasyon an analiz revele sis gwoup rechèch laj nan literati a. Etid sa a se youn nan premye tantativ pou rezime rechèch abèy nan agrikilti epi sijere direksyon rechèch nan lavni. |
entwodiksyon
Agrikilti reprezante sous manje prensipal nan mond lan (Friha et al., 2021), epi li te fè fas ak gwo defi akòz
ogmante demann pou pwodwi manje, sekirite manje, ak enkyetid sekirite osi byen ke apèl pou pwoteksyon anviwònman, prezèvasyon dlo, ak
dirabilite (Inoue, 2020). Yo prevwa devlopman sa a ap kontinye depi yo estime popilasyon mondyal la rive nan 9.7 milya dola pa 2050.
(2019). Depi agrikilti konstitye egzanp ki pi enpòtan nan konsomasyon dlo globalman, li espere ke demann manje ak dlo
konsomasyon pral ogmante dramatikman nan fiti previzib. Anplis de sa, ogmante konsomasyon angrè ak pestisid
makonnen ak entansifikasyon nan aktivite agrikilti ka mennen nan defi anviwònman nan lavni. Menm jan an tou, tè arabl limite, ak la
kantite kiltivatè yo ap diminye atravè lemond. Defi sa yo aksantué bezwen pou solisyon agrikilti inovatè ak dirab (Elijah
et al., 2018; Friha et al., 2021; Inoue, 2020; Tzounis et al., 2017).
Enkòpore nouvo teknoloji yo te idantifye kòm yon solisyon pwomèt pou adrese defi sa yo. Agrikilti entelijan (Brewster et al.,
2017; Tang et al., 2021) ak agrikilti presizyon (Feng et al., 2019; Khanna & Kaur, 2019) te parèt kòm rezilta deba sa yo. La
ansyen se yon nosyon jeneral pou adopte teknoloji enfòmasyon kominikasyon (ICT) ak lòt inovasyon dènye kri nan aktivite agrikilti pou ogmante efikasite ak efikasite (Haque et al., 2021). Lèt la konsantre sou jesyon sit-espesifik nan ki tè a divize an
pati omojèn, epi chak pati jwenn kantite egzak opinyon agrikòl pou optimize pwodiksyon rekòt pa mwayen nouvo teknoloji (Feng et al., 2019; Khanna & Kaur, 2019). Teknoloji enpòtan ki te atire atansyon entelektyèl yo nan domèn sa a gen ladan Wireless Sensor Networks (WSNs) (J. Zheng & Yang, 2018; Y. Zhou et al., 2016), Entènèt bagay sa yo (IoT) (Gill et al., 2017; He et al., 2021 Liu et al., 2019);
teknik entèlijans atifisyèl (AI), ki gen ladan aprantisaj machin ak aprantisaj pwofon (Liakos et al., 2018; Parsaeian et al., 2020; Shadrin et al.,
2019), teknoloji informatique (Hsu et al., 2020; Jinbo et al., 2019; Zamora-Izquierdo et al., 2019), gwo done (Gill et al., 2017; Tantalaki
et al., 2019), ak blockchain (PW Khan et al., 2020; Pincheira et al., 2021).
Anplis de teknoloji ki endike anwo yo, teledeteksyon yo te konsidere kòm yon zouti teknolojik ki gen gwo potansyèl pou amelyore
agrikilti entelijan ak presizyon. Satelit, avyon ki gen ekipaj imen, ak dron yo se teknoloji teledeteksyon popilè (Tsouros et al., 2019).
Abèy yo, ke yo rekonèt kòm Veyikil Ayeryen San Pilote (UAVs), Sistèm Avyon San Pilote (UAS), ak avyon ki pilote adistans, se nan
gwo enpòtans paske yo gen plizyè avantaj an konparezon ak lòt teknoloji teledeteksyon. Pou egzanp, dron ka delivre
imaj-wo kalite ak rezolisyon segondè nan jou twoub (Manfreda et al., 2018). Epitou, disponiblite yo ak vitès transfè konstitye lòt
benefis (Radoglou-Grammatikis et al., 2020). Konpare ak avyon, dron yo trè pri-efikas ak fasil yo mete ak kenbe (Tsouros et al., 2019). Malgre ke yo te okòmansman te itilize sitou pou rezon militè, dron ka benefisye anpil aplikasyon sivil, pou egzanp nan jesyon chèn ekipman pou (A. Rejeb, Rejeb, et al., 2021a), pou rezon imanitè (A. Rejeb, Rejeb, et al., 2021c), agrikilti entelijan, sondaj ak kat, dokiman eritaj kiltirèl, jesyon dezas, ak konsèvasyon forè ak bèt sovaj (Panday, Pratihast, et al., 2020). Nan agrikilti, plizyè zòn aplikasyon dron egziste paske yo ka entegre ak nouvo teknoloji, kapasite enfòmatik, ak detèktè abò pou sipòte jesyon rekòt (egzanp, kat, siveyans, irigasyon, dyagnostik plant) (H. Huang et al., 2021) , rediksyon katastwòf, sistèm avètisman bonè, bèt sovaj ak konsèvasyon forè pou nonmen kèk (Negash et al., 2019). Menm jan an tou, dron yo ta ka ogmante nan plizyè aktivite agrikòl, tankou siveyans rekòt ak kwasans, estimasyon pwodiksyon, evalyasyon estrès dlo, ak deteksyon move zèb, ensèk nuizib, ak maladi (Inoue, 2020; Panday, Pratihast, et al., 2020). Non sèlman ka itilize dron pou siveyans, estimasyon, ak deteksyon rezon ki baze sou done sansoryèl yo, men tou pou irigasyon presizyon ak presizyon raje, ensèk nuizib, ak jesyon maladi. Nan lòt mo, dron yo kapab flite dlo ak pestisid nan kantite egzak ki baze sou done anviwònman an. Benefis dron yo nan agrikilti yo rezime nan Tablo 1.
Avantaj prensipal dron nan agrikilti.
| Benefisye | Referans (yo) |
| Amelyore tanporèl ak espasyal deteksyon rezolisyon yo | (Gago et al., 2015; Niu et al., 2020; Srivastava et al., 2020) |
| Fasilite agrikilti presizyon | (L. Deng et al., 2018; Kalischuk et al., 2019; Maimaitijiang et al., 2017) |
| Klasifikasyon ak Scouting nan rekòt | (Inoue, 2020; Kalischuk et al., 2019; Lopez-´ Granados et al., 2016; Maimaitijiang et al., 2017; Melville et al., 2019; Moharana & Dutta, 2016) |
| Itilizasyon angrè | (L. Deng et al., 2018; Guan et al., 2019) |
| Siveyans nan sechrès | (Fawcett et al., 2020; Panday, Pratihast, et al., 2020; Su et al., 2018) |
| Estimasyon byomass | (Bendig et al., 2014) |
| Estimasyon sede | (Inoue, 2020; Panday, Shrestha, et al., 2020; Tao et al., 2020) |
| Rediksyon dezas | (Negash et al., 2019) |
| Konsèvasyon bèt sovaj ak forè | (Negash et al., 2019; Panday, Pratihast, et al., 2020) |
| Evalyasyon estrès dlo | (Inoue, 2020; J. Su, Coombes, et al., 2018; L. Zhang et al., 2019) |
| Ensèk nuizib, move zèb, ak maladi deteksyon | (Gaˇsparovi´c et al., 2020; Inoue, 2020; J. Su, Liu, et al., 2018; X. Zhang et al., 2019) |
Nan lòt men an, dron fè fas ak limit tou. Patisipasyon pilòt, pouvwa motè, estabilite ak disponiblite, bon jan kalite detèktè akòz chaj
limit pwa, depans aplikasyon, ak règleman avyasyon, se pami yo (C. Zhang & Kovacs, 2012). Nou konpare enpèfeksyon yo
nan twa teknoloji teledeteksyon mobil nan Tablo 2. Lòt teknoloji teledeteksyon, tankou detèktè tè, pi lwen pase konsantre nan etid sa a.
Enpèfeksyon nan divès kalite teknoloji mobil deteksyon remote.
| Remote aleka teknoloji | Enpèfeksyon | Referans |
| Drone (UAV) | Patisipasyon pilòt; imaj' bon jan kalite (mwayèn); depans aplikasyon (mwayèn); estabilite, manyablite, ak fyab; normalisation; pouvwa motè; pouvwa limite sous (lonjevite batri); dire vòl limite, kolizyon ak cyberatacks; limite pwa chaj; gwo done ak tretman done limite kapasite; mank de règleman; mank de ekspètiz, gwo antre baryè nan aksè a dron agrikòl; | (Bacco et al., 2018; Dawaliby et al., 2020; Hardin & Hardin, 2010; Hardin & Jensen, 2011; Lagkas et al., 2018; Laliberte et al., 2007; Laliberte & Rango, 2011; Manfreda et al., 2018, 2018; Nebiker et al., 2008; Puri et al., 2017; Velusamy et al., 2022; C. Zhang & Kovacs, 2012) |
| Satelit | Kouvèti satelit peryodik, rezolisyon espektral limite; vilnerabilite nan pwoblèm vizibilite (egzanp, nwaj); Indisponibilite ak vitès transfere ki ba; oryantasyon ak vignetting efè done espasyal ki koute chè koleksyon; ralanti livrezon done tan pou itilizatè fen yo | (Aboutalebi et al., 2019; Sen et al., 2019; Chen et al., 2019; Nansen & Elliott, 2016; Panday, Pratihast, et al., 2020; Sai Vineeth et al., 2019) |
| Avyon | Segondè pri adopsyon; konplike konfigirasyon; depans antretyen; indisponibilite nan serye avyon, jeyometri nan imaj; done ki pa regilye akizisyon; mank de fleksibilite; aksidan ki ka touye moun; done detèktè varyasyon akòz vibrasyon; pwoblèm georeferancing | (Armstrong et al., 2011; Atkinson et al., 2018; Barbedo & Koenigkan, 2018; Kovalev & Voroshilova, 2020; Suomalainen et al., 2013; Thamm et al., 2013) |
Kòm yon teknoloji miltidisiplinè ak miltibi nan agrikilti, dron yo te envestige nan divès pèspektiv. Pou egzanp, entelektyèl yo te egzamine aplikasyon dron nan agrikilti (Kulbacki et al., 2018; Mogili & Deepak, 2018), kontribisyon yo nan agrikilti presizyon (Puri et al., 2017; Tsouros et al., 2019), konplemantarite yo ak lòt. teknoloji dènye kri (Al-Thani et al., 2020; Dutta & Mitra, 2021; Nayyar et al., 2020; Saha et al., 2018), ak posiblite pou avanse kapasite navigasyon ak deteksyon yo (Bareth et al. , 2015; Suomalainen et al., 2014). Depi rechèch sou aplikasyon abèy nan agrikilti te vin pi popilè (Khan et al., 2021)), gen yon nesesite pou rezime literati ki egziste deja ak revele estrikti entelektyèl domèn nan. Anplis de sa, kòm yon domèn gwo teknoloji ak amelyorasyon kontinyèl, revizyon estriktire yo bezwen fèt pou rezime detanzantan literati ki egziste yo epi idantifye twou vid ki genyen nan rechèch enpòtan. Pou
dat, gen kèk revizyon ki diskite sou aplikasyon dron nan sektè agrikòl la. Pou egzanp, Mogili and Deepak (2018) yon ti tan revize enplikasyon dron yo pou siveyans rekòt ak flite pestisid. Inoue (2020) fè yon revizyon sou itilizasyon satelit ak abèy nan teledeteksyon nan agrikilti. Otè a eksplore defi teknolojik yo nan adopte agrikilti entelijan ak kontribisyon yo nan satelit ak dron ki baze sou etid ka ak pi bon pratik. Tsouros et al. (2019) rezime diferan kalite dron ak aplikasyon prensipal yo nan agrikilti, mete aksan sou divès kalite akizisyon done ak metòd pwosesis. Plis resamman, Aslan et al. (2022) te fè yon revizyon konplè sou aplikasyon UAV nan aktivite agrikòl epi li te souliye enpòtans lokalizasyon similtane ak kat pou yon UAV nan lakòz efè tèmik la. Diaz-Gonzalez et al. (2022) te revize etid resan pwodiksyon rekòt ki baze sou diferan teknik aprantisaj machin ak aleka
sistèm deteksyon yo. Konklizyon yo te endike ke UAV yo itil pou estime endikatè tè yo ak depase sistèm satelit yo an tèm de rezolisyon espasyal, tanporalite enfòmasyon, ak fleksibilite. Basiri et al. (2022) te fè yon revizyon konplè sou divès apwòch ak metòd pou simonte defi planifikasyon chemen pou UAV milti-rotor nan yon kontèks agrikilti presizyon. Anplis, Awais et al. (2022) rezime aplikasyon done deteksyon aleka UAV nan rekòt yo estime estati dlo a epi li bay yon sentèz pwofondè nan kapasite potansyèl de deteksyon aleka UAV pou aplikasyon estrès fatra. Finalman, Aquilani et al. (2022) te revize teknoloji agrikilti previzyon ki aplike nan sistèm bèt ki baze sou savann epi li te dedwi ke deteksyon aleka pèmèt UAV yo se avantaje pou evalyasyon byomass ak jesyon bann bèt yo.
Epitou, efò pou itilize UAV nan siveyans, swiv, ak rasanble bèt yo te rapòte dènyèman.
Malgre ke revizyon sa yo bay nouvo apèsi enpòtan, pa gen okenn revizyon konplè ak ajou ki baze sou bibliyometrik yo ka jwenn nan literati a, ki prezante yon espas konesans klè. Anplis, li te deklare ke lè pwodiksyon akademik grandi nan yon domèn syantifik, li vin vital pou chèchè yo anplwaye apwòch revizyon quantitative pou konprann estrikti konesans nan domèn nan (Rivera & Pizam, 2015). Menm jan an tou, Ferreira et al. (2014) te diskite ke kòm domèn rechèch ki gen matirite epi yo vin konplike, entelektyèl yo ta dwe vize detanzantan fè sans nan konesans ki pwodui ak rasanble pou revele nouvo kontribisyon yo, kaptire tradisyon rechèch ak tandans, idantifye ki sijè yo etidye, epi fouye nan estrikti konesans nan. jaden an ak direksyon rechèch potansyèl yo. Pandan ke Raparelli ak Bajocco (2019) te fè yon analiz bibliyometrik pou egzamine domèn konesans aplikasyon abèy nan agrikilti ak forè, etid yo sèlman konsidere rechèch savan ki te pibliye ant 1995 ak 2017, ki pa reflete dinamik zòn sa a k ap deplase rapid. Anplis de sa, otè yo pa t eseye idantifye kontribisyon ki pi enfliyan yo nan domèn nan, gwoup literati a, epi evalye estrikti entelektyèl la lè l sèvi avèk analiz ko-sitasyon. Kòm yon rezilta, li nesesè rezime literati a pou revele fokis rechèch aktyèl yo, tandans, ak pwen otspo.
Pou ranpli espas sa a konesans, nou ogmante metodoloji quantitative ak metòd bibliyometrik solid pou egzamine eta aktyèl rechèch la nan kafou dron ak agrikilti. Nou diskite ke etid aktyèl la fè plizyè kontribisyon nan literati ki egziste deja lè li egzamine yon teknoloji émergentes ki trè nesesè nan agrikilti paske li bay potansyèl fòmidab pou chanje plizyè aspè nan sektè sa a. Bezwen an pou yon analiz bibliyometrik nan dron agrikòl yo santi plis toujou akòz konesans yo gaye ak fragman sou dron nan kontèks agrikilti a. Menm jan an tou, literati ki gen rapò ak dron agrikòl yo oblije regroupe sistematikman, konsidere etid ki pi enfliyan ki bati fondasyon domèn rechèch sa a. Merit la nan analiz la gen ladan tou klarifikasyon nan tèm rechèch prensipal ki reprezante nan literati a. Lè nou konsidere potansyèl transfòmasyon teknoloji a, nou postule ke yon analiz rezo pwofon bay nouvo apèsi nan detèmine travay enfliyan ak revele tèm konsènan potansyèl dron yo pou agrikilti.
Se poutèt sa, nou fè efò reyalize objektif rechèch sa yo:
- Idantifikasyon piblikasyon enfliyan ak kontribisyon eksepsyonèl nan aplikasyon dron nan domèn agrikilti.
- Gwoupman nan literati a, idantifikasyon fokis rechèch yo, ak kat etid prensipal 'estrikti entelektyèl' ki baze sou resanblans semantik lè l sèvi avèk analiz ko-sitasyon.
- Konpreyansyon sou evolisyon lyen ak rezo sitasyon sou tan nan mitan divès piblikasyon nan domèn nan ak idantifikasyon direksyon rechèch nan lavni ak sijè ki pi cho.
Rès papye a estriktire jan sa a: seksyon 2 esplike metodoloji ak etap koleksyon done yo; seksyon 3 bay rezilta analiz yo; epi seksyon 4 diskite rezilta yo epi fini ak kontribisyon rechèch, enplikasyon, ak direksyon pou lavni.
Metodoloji
Nan etid rechèch aktyèl sa a, nou fè yon analiz bibliyometrik pou eksplore aplikasyon dron nan agrikilti. Apwòch quantitative sa a revele estrikti entelektyèl domèn konesans (Arora & Chakraborty, 2021) ak sitiyasyon aktyèl la, sijè ki pi enpòtan yo, ak direksyon rechèch nan lavni ki ka envestige lè w aplike metòd sa a (Kapoor et al., 2018; Mishra et al. , 2017; A. Rejeb, et al., 2021b A. Rejeb et al., 2021d; Anjeneral, yon analiz bibliyometrik egzamine literati ki egziste deja pou rezime epi dekouvwi modèl kache kominikasyon ekri ak evolisyon disiplin nan ki baze sou estatistik ak metòd matematik, epi li aplike pou gwo seri done (Pritchard, 2020; Small, 1969; Tahai & Rigsby). , 1999). Lè nou sèvi ak bibliyometrik, nou aspire pi byen konprann paradigm yo ki deja egziste ak fokis rechèch ki kontribye nan domèn nan ki baze sou resanblans (Thelwall, 1998). Bibliometrik bay nouvo konpreyansyon ki te sipòte pa fòs objektif quantitative metodoloji a (Casillas & Acedo, 2008). Anpil entelektyèl te deja fè etid bibliyometrik nan domèn ki gen rapò, tankou agrikilti, teledeteksyon, ak transfòmasyon dijital (Armenta-Medina et al., 2007; Bouzembrak et al., 2020; A. Rejeb, Treiblmaier, et al., 2019; Wamba & Queiroz, 2021 Wang et al., 2021).
Analiz sitasyon
Analiz sitasyon revele divès kalite apèsi sou yon domèn rechèch bay yo. Premye a tout, li ede revele otè ki pi enfliyan ak piblikasyon ki kontribye nan yon domèn rechèch bay epi ki fè yon enpak enpòtan (Gundolf & Filser, 2013). Dezyèmman, koule konesans ak lyen kominikasyon ant otè yo ka dekouvri. Finalman, lè w trase lyen ki genyen ant travay site ak site, yon moun ka eksplore chanjman ak evolisyon yon domèn konesans sou tan (Pournader
et al., 2020). Gwo nimewo sitasyon yon piblikasyon reflete enpòtans li ak kontribisyon sibstansyèl nan domèn rechèch la (Baldi, 1998; Gundolf & Filser, 2013; Marinko, 1998). Analiz sitasyon piblikasyon yo ede tou idantifye travay ki enpòtan yo epi swiv popilarite yo ak pwogrè yo sou tan.
Dokiman analiz ko-sitasyon
Analiz ko-sitasyon se yon metòd ki gen anpil valè pou eksplore relasyon ant piblikasyon yo epi dekri estrikti entelektyèl yon jaden (Nerur et al., 2008). Nan lòt mo, lè yo idantifye piblikasyon ki pi site yo ak koneksyon yo, metòd la gwoupe piblikasyon an gwoup rechèch diferan kote piblikasyon nan yon gwoup regilyèman pataje lide menm jan an (McCain, 1990; Small, 1973). Li enpòtan pou mansyone ke resanblans pa vle di ke rezilta yo nan piblikasyon yo se
limenm ak dakò youn ak lòt; piblikasyon yo fè pati menm gwoup la akòz resanblans sijè yo, men yo ka gen opinyon kontredi.
Koleksyon done ak analiz
Apre metodoloji White and Griffith (1981) te pwopoze a, nou te fè yon rechèch konplè sou atik jounal pou kouvri tout domèn rechèch aplikasyon dron nan agrikilti, pouswiv senk etap sa yo:
- Premye etap la te kolekte done. Scopus te chwazi kòm youn nan baz done ki pi konplè ak konfyans ak rezilta ofisyèl yo. Yo te jwenn meta-done piblikasyon ki gen rapò ak tout aplikasyon abèy nan agrikilti. Lè sa a, nou analize atik yo chwazi yo, retire atik ki pa sou sijè nan analiz la.
- Nou analize literati a epi idantifye mo kle ki pi enpòtan yo itilize nan zòn rechèch la.
- Sèvi ak analiz sitasyon, nou eksplore koneksyon ki genyen ant otè ak dokiman yo revele modèl sitasyon ki kache yo. Nou menm tou nou idantifye otè ki pi enfliyan ak piblikasyon ak kontribisyon enpòtan nan domèn dron agrikòl yo.
- Nou te fè yon analiz ko-sitasyon pou gwoupe piblikasyon menm jan an nan grap.
- Finalman, nou analize koneksyon ak lyen ki genyen ant peyi, enstitisyon, ak jounal pou montre rezo kolaborasyon an.
Idantifikasyon tèm rechèch ki apwopriye yo
Nou te aplike chèn rechèch sa yo pou agrégation done: (abèy* OSWA "veyikil ayeryen san ekipe" OSWA uav* OSWA "sistèm avyon san ekipe” OSWA uas OSWA "Avyon ki telepilote”) AK (agrikilti OSWA agrikilti OSWA agrikilti OSWA kiltivatè). Rechèch la te fèt nan mwa septanm 2021. Dron yo gen plizyè deziyasyon, ki gen ladan UAV, UAS, ak avyon ki te kontwole adistans (Sah et al., 2021). Tèm rechèch espesifik ki gen rapò ak agrikilti yo te idantifye baze sou etid Abdollahi et al. (2021). Pou rezon klète ak transparans, rechèch egzak nou te itilize yo bay nan Anèks 1. Apre yon pwosesis netwayaj done, nou te kreye yon dosye tèks ki answit te chaje nan BibExcel, yon zouti komen pou sitasyon ak analiz ko-sitasyon. Zouti sa a ofri tou senp entèraksyon ak lòt lojisyèl epi li ofri yon degre enpòtan nan libète nan manyen done ak analiz. VOSviewer vèsyon 1.6.16 yo te itilize pou visualize rezilta yo epi jenere rezo bibliyometrik yo (Eck & Waltman, 2009). VOSviewer ofri yon seri vizyalizasyon entwisyon, patikilyèman pou analize kat bibliyometrik (Geng et al., 2020). Anplis de sa, li ede bay rezilta vizyèl klè ki ede pi byen konprann rezilta yo (Abdollahi et al., 2021). Aplike kòd rechèch yo jan sa di pi wo a, nou rasanble epi estoke tout piblikasyon ki enpòtan yo. Premye rezilta rechèch yo bay yon total de 5,085 dokiman. Pou asire bon jan kalite echantiyon chwazi a, yo te konsidere sèlman atik jounal ki revize kanmarad yo nan rechèch la, sa ki lakòz esklizyon lòt kalite dokiman, tankou liv, chapit, pwosedi konferans, ak nòt editoryal. Pandan yon pwosesis tès depistaj, piblikasyon ki pa enpòtan (sa vle di, pi lwen pase sijè ki abòde travay sa a), redondants (sa vle di, kopi ki soti nan doub endèks), ak piblikasyon ki pa pale angle yo te filtre. Pwosesis sa a te lakòz enklizyon 4,700 dokiman nan analiz final la.
Konklizyon ak diskisyon
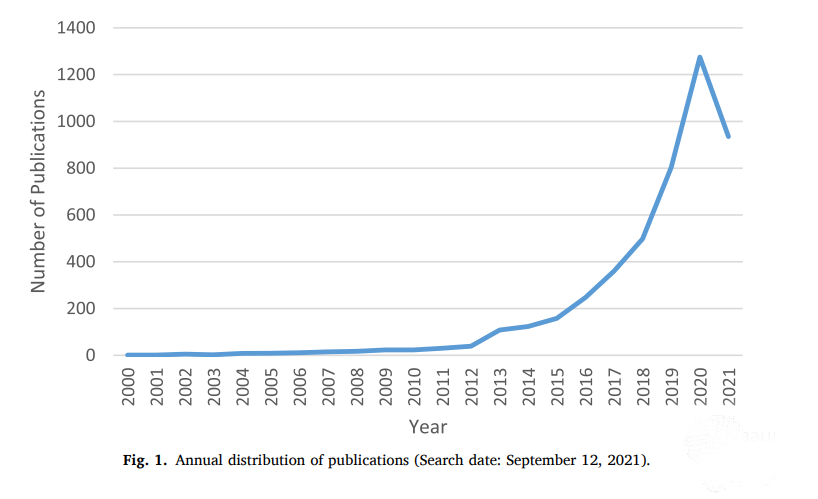
Pou kòmanse, nou analize devlopman yo nan pwodiksyon piblikasyon nan literati aktyèl la sou dron agrikòl. Distribisyon tanporèl rechèch savan yo montre nan Fig. 1. Nou wè yon ogmantasyon rapid nan piblikasyon apati ane 2011 (30 piblikasyon) pi devan; Se poutèt sa, nou deside divize peryòd analiz la an de etap diferan. Nou refere a peryòd ant 1990 ak 2010 kòm etap nan konstriksyon, ki te gen apeprè sèt papye pibliye chak ane. Yo te rele peryòd apre 2010 la etap kwasans depi rechèch sou aplikasyon dron nan agrikilti te temwen yon vag eksponansyèl pandan peryòd sa a. Apre 2010, ogmante kantite piblikasyon yo konfime enterè k ap grandi nan mitan chèchè yo, ki montre tou ke dron yo te aplike nan teledeteksyon epi yo te itilize nan agrikilti presizyon (Deng et al., 2018; Maes & Steppe, 2019; Messina & Modica, 2020). ). Espesyalman, kantite piblikasyon yo te monte soti nan 108 an 2013 a 498 an 2018 e li te monte nan 1,275 an 2020. Yo te pibliye yon total 935 atik ant janvye ak mitan mwa septanm 2021. Apre sa, nou te chwazi konsantre analiz nou an plis sou etap kwasans lan. depi peryòd sa a reflete sibtilite ki pi resan ak enpòtan nan dron agrikòl.
Mo kle analiz
Mo kle otè yo chwazi pou yon piblikasyon gen yon enpak enpòtan sou fason papye a reprezante ak fason li kominike nan kominote syantifik yo. Yo idantifye sijè prensipal yo nan rechèch la epi detèmine potansyèl li yo fleri oswa echwe (Day & Gastel, 1998.; Kim et al., 2016; Uddin et al., 2015). Analiz mo kle, yon zouti pou revele tandans rechèch pi laj ak direksyon, refere a konpilasyon mo kle tout piblikasyon ki gen rapò nan yon domèn (Dixit & Jakhar, 2021). Nan etid aktyèl la, nou divize mo kle yo an de seri (sa vle di, jiska 2010 ak 2011–2021) pou eksplore sijè ki pi popilè yo. Lè nou fè sa, nou ka trase mo kle yo enpòtan nan tou de ansanm epi asire ke nou te kaptire tout done ki nesesè yo. Pou chak seri, dis mo kle yo prezante nan Tablo 3. Nou elimine enkonsistans lè nou melanje mo kle semantik ki idantik, tankou "abèy" ak "abèy" oswa, menm jan an, "Entènèt bagay sa yo" ak "IoT.".
Tablo 3 montre ke "veyikil ayeryen san ekipe" se yon mo kle ki pi souvan itilize kòm konpare ak "abèy" ak "sistèm ayeryen san ekipe" nan tou de peryòd tan. Epitou, "teledeteksyon", "agrikilti presizyon," ak "agrikilti" yo trè klase nan tou de peryòd. Nan premye peryòd la, "agrikilti presizyon" te klase senkyèm, epi li te klase dezyèm nan dezyèm peryòd la, ki montre kouman dron yo ap vin de pli zan pli enpòtan nan reyalize agrikilti presizyon kòm yo ka fè siveyans,
deteksyon, ak estimasyon pratik pi vit, pi bon mache, ak pi fasil pou fè an konparezon ak lòt sistèm teledeteksyon ak ki baze sou tè. Epitou, yo ka flite kantite egzak nan opinyon (egzanp, dlo oswa pestisid) lè sa nesesè (Guo et al., 2020; Inoue, 2020; Panday, Pratihast, et al., 2020).
Lis mo kle ki pi souvan itilize yo.
Klase | 1990-2010 | No. nan ensidan | 2011-2021 | No. nan ensidan |
| 1 | ayeryen san ekipe machin | 28 | sans machin ayeryen | 1628 |
| 2 | remote aleka | 7 | presizyon agrikilti | 489 |
| 3 | agrikilti | 4 | remote aleka | 399 |
| 4 | ayeryèn | 4 | abèy | 374 |
| 5 | presizyon agrikilti | 4 | sans sistèm ayeryen | 271 |
| 6 | ayeryen san ekipe | 4 | agrikilti | 177 |
| 7 | ipèspektral Capteur | 3 | pwofondè aprantisaj | 151 |
| 8 | atifisyèl neral rezo | 2 | machin aprann | 149 |
| 9 | vòl otonòm | 2 | vejetasyon an endèks | 142 |
| 10 | kafe | 2 | Entènèt nan Bagay sa yo | 124 |
Yon lòt karakteristik enteresan se prezans nan teknoloji konplemantè. Nan premye etap la, "Hyperspectral Sensor" ak "rezo neral atifisyèl" (ANN) se yo ki pami dis mo kle yo. D 'hyperspectral revolusyone D tradisyonèl pa kolekte yon gwo kantite imaj nan longèdonn divès kalite. Lè w fè sa, detèktè yo ka kolekte pi bon enfòmasyon espasyal ak espèk an menm tan an konparezon ak imaj miltispektral, spèktroskopi, ak imaj RGB (Adao ˜ et al.,
2017). Ensidan an nan "ANN" nan premye etap la ak "aprantisaj pwofon" (DL) ak "aprantisaj machin" (ML) nan dezyèm lan implique ke pi fò nan travay yo pibliye konsantre sou egzamen an nan potansyèl teknik AI pou drone-. agrikilti ki baze sou. Malgre ke dron yo kapab vole otonòm, yo toujou mande pou patisipasyon yon pilòt, ki vle di yon nivo ki ba nan entèlijans aparèy. Sepandan, pwoblèm sa a ka rezoud akòz avansman teknik AI, ki ka bay pi bon konsyans sitiyasyon ak sipò otonòm desizyon. Ekipe ak AI, dron ka evite kolizyon pandan navigasyon, amelyore jesyon tè ak rekòt (Inoue, 2020), epi redwi travay ak estrès pou èt imen (BK Sharma et al., 2019).
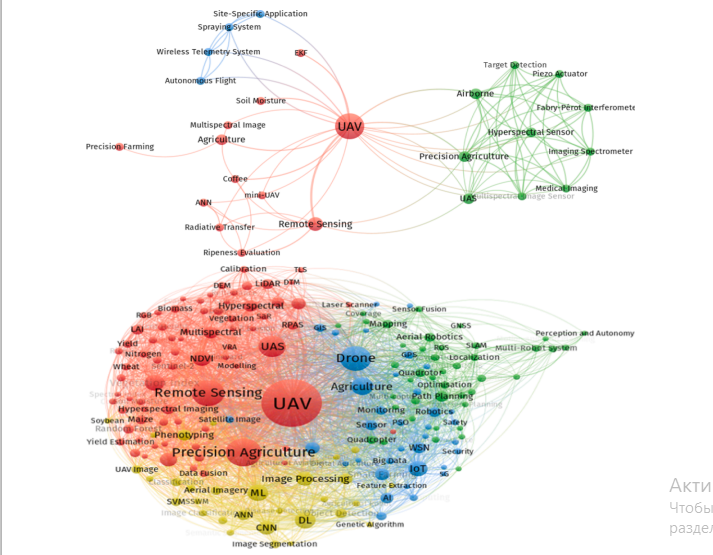
Akòz fleksibilite yo ak kapasite yo pou jere yon gwo kantite done ki pa lineyè, teknik AI yo se metòd apwopriye pou analize done yo transmèt pa dron ak lòt sistèm teledeteksyon ak ki baze sou tè pou prediksyon ak pran desizyon (Ali et al., 2015; Inoue, 2020). Anplis de sa, prezans "IoT" nan dezyèm peryòd la endike wòl émergentes li nan agrikilti. IoT ap revolisyone agrikilti lè li konekte lòt teknoloji, tankou dron, ML, DL, WSN, ak gwo done. Youn nan benefis kle yo nan aplikasyon IoT se kapasite li nan efikasite ak efektivman rantre divès travay (akizisyon done, analiz ak pwosesis done, pran desizyon, ak aplikasyon) nan prèske tan reyèl (Elijah et al., 2018; Feng et al. , 2019; Muangprathub et al., 2019). Anplis de sa, dron yo konsidere kòm zouti efikas pou kaptire done ki nesesè pou kalkile vigè ak pwopriyete vejetasyon yo (Candiago et al., 2015). Fig. 2a ak 2b ilistre rezo mo kle yo pou tou de peryòd tan.
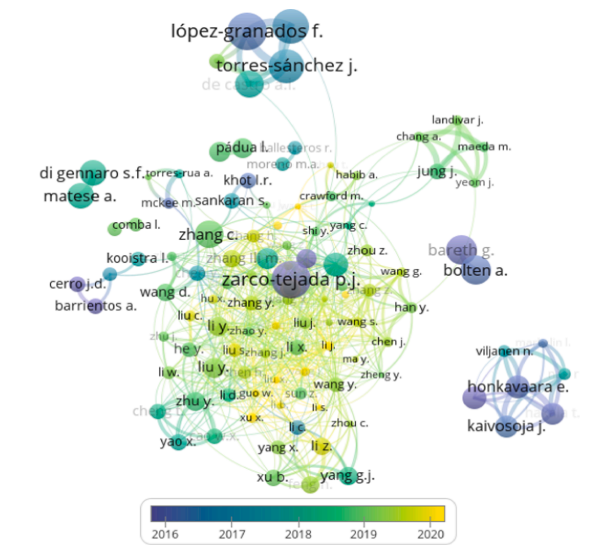
Otè enfliyan
Nan seksyon sa a, nou detèmine otè enfliyan yo epi egzaminen ki jan rezo sitasyon otè yo ka wè ak òganize literati aktyèl la. Fig. 3 montre kouvri kwonolojik tout chèchè ki gen pi gwo kantite sitasyon yo. Echèl koulè a reflete varyasyon sitasyon otè yo selon ane yo. Nou egzamine estrikti sitasyon chèchè ki pibliye etid sou dron agrikòl lè l sèvi avèk yon papòt minimòm 50 sitasyon ak dis piblikasyon. Soti nan
12,891 otè, sèlman 115 satisfè kondisyon sa a. Tablo 4 bay lis dis premye otè enfliyan yo, klase dapre kantite maksimòm sitasyon yo. Lopez- Granados F. mennen lis la ak 1,963 sitasyon, ki te swiv pa Zarco-Tejada PJ ak 1,909 sitasyon.
Lis otè ki pi site yo.
| Plase | otè | Sitasyon |
| 1 | Lopez-Granados ´ F. | 1,963 |
| 2 | Zarco-Tejada PJ | 1,909 |
| 3 | Pena ˜ JM | 1,644 |
| 4 | Torres-S' menmz J. | 1,576 |
| 5 | Fereres E | 1,339 |
| 6 | Remondino F | 1,235 |
| 7 | Bolten A | 1,160 |
| 8 | Bareth G | 1,155 |
| 9 | Berni JA | 1,132 |
| 10 | de Castro AI | 1,036 |
Lè li rive piblikasyon endividyèl, atik Zhang ak Kovacs (2012) te etid ki pi site pibliye nan Precision Agriculture. Isit la, otè yo revize aplikasyon UAS nan agrikilti presizyon. Konklizyon yo nan rechèch yo sijere ke gen yon bezwen avanse konsepsyon platfòm, pwodiksyon, normalisation nan jereferans imaj, ak workflow rekipere enfòmasyon yo bay fèmye yo ak pwodwi fen serye. Anplis de sa, yo rekòmande pou angaje kiltivatè a pi fò, espesyalman nan planifikasyon jaden, kaptire imaj, osi byen ke entèpretasyon done ak analiz. Sa ki enpòtan, etid sa a te pami premye moun ki montre enpòtans UAV nan kat jaden, kat vigè, mezi kontni chimik, siveyans estrès vejetasyon, ak evalyasyon efè angrè sou kwasans plant yo. Defi ki gen rapò ak teknoloji a gen ladan tou pri entèdi, kapasite detèktè, estabilite platfòm ak fyab, mank de normalisation, ak pwosedi ki konsistan pou analize gwo kantite done.
Analiz sitasyon
Analiz sitasyon reprezante etid enfliyans atik yo, byenke gen tandans koule (egzanp, patipri sitasyon, sitasyon pwòp tèt ou) konsidere kòm youn nan enstriman estanda pou evalyasyon enpak la (Osareh, 1996; A. Rejeb et al., 2022; Sarli et al., 2010). Sitasyon yo tou reflete enpòtans ak vitalite kontribisyon papye yo nan literati a sou yon sijè espesifik (R. Sharma et al., 2022). Nou te fè yon analiz sitasyon pou detèmine etid ki pi enfliyan sou dron agrikòl ak rezime kontni yo. Tablo 5 prezante lis kenz papye ki pi enfliyan pou peryòd 1990–2010 ak 2011–2021. Atik yo pa Berni et al. (2009)b ak Austin (2010) yo te pi site pandan ane 1990 ak 2010, ak 831 ak 498 sitasyon, respektivman. Berni et al. (2009)b ilistre potansyèl pou devlope pwodwi teledeteksyon quantitative atravè yon UAV ki baze sou elikoptè ekipe ak detèktè D 'multispectral tèmik ak bande etwat abòdab. Konpare ak detèktè ayeryèn lòm tradisyonèl yo, yon sistèm UAV pri ki ba pou agrikilti se kapab reyalize estimasyon konparab nan paramèt yo byofizik nan rekòt, si se pa pi bon. Pri abòdab ak fleksibilite operasyonèl la, ansanm ak rezolisyon espèk, espasyal ak tanporèl segondè ki disponib nan yon tan rapid, rann UAV yo apwopriye pou yon seri aplikasyon ki mande pou jesyon tan enpòtan, tankou orè irigasyon, ak agrikilti presizyon. Papye ki soti nan Berni et al. (2009)b se trè site paske li efektivman entegre yon platfòm zèl rotary san ekipe ak detèktè dijital ak tèmik ak mekanis kalibrasyon ki nesesè pou aplikasyon agrikòl. Dezyèm piblikasyon ki pi site la se yon liv Austin (2010) ki te ekri, ki te diskite sou UAV nan pèspektiv konsepsyon, devlopman ak deplwaman. Nan agrikilti, UAV yo sipòte siveyans rekòt lè yo detekte maladi bonè atravè chanjman koulè rekòt yo, fasilite simen rekòt ak flite, ak siveyans ak kondwi bèf.
Etid yo nan Sullivan et al. (2007), Lumme et al. (2008), ak Gokto ¨ ǧan et al. (2010) fini lis top kenz atik ki pi site yo. Atik sa yo montre devlopman sistèm UAV ki baze sou pou sipòte agrikilti. Yo ofri solisyon pou divès pwoblèm, tankou siveyans rekòt ak optik, siveyans ak jesyon move zèb, ak sipò pou desizyon. Yo sijere tou epi diskite sou kapasite UAV a pou ogmante efikasite echantiyon yo epi ede fèmye yo nan elabore egzat ak efikas.
estrateji pou plante. De papye te ekri pa Berni (Berni et al., 2009b; Berni et al., 2009a), ki souliye enpak enpòtan li sou rechèch ki gen rapò ak abèy agrikòl. Papye ki soti nan Zarco-Tejada et al. (2014) te pami etid pyonye yo pou ilistre nesesite pou itilize simagri UAV a pri ki ba nan quantifikasyon wotè pye bwa.
Lis piblikasyon ki pi site yo.
| Klase | Soti nan 1990 2010 | Soti nan 2011 2021 | ||
| Dokiman | Sitasyon | Dokiman | Sitasyon | |
| 1 | (Berni et al., 2009b) | 831 | (C. Zhang & Kovacs, 2012) | 967 |
| 2 | (Austin, 2010) | 498 | (Nex & Remondino, 2014) | 893 |
| 3 | (Hunt et al., 2010) | 331 | (Floreano & Wood, 2015) | 552 |
| 4 | (SR Herwitz et al., 2004) | 285 | (Hossein Motlagh et al., 2016) | 391 |
| 5 | (CCD Lelong et al., 2008) | 272 | (Shakhatreh et al., 2019) | 383 |
| 6 | (Berni et al., 2009b) | 250 | (Ma et al., 2017) | 373 |
| 7 | (Grenzdorffer ¨ et al., 2008) | 198 | (Bendig et al., 2014) | 360 |
| 8 | (Hrabar et al., 2005) | 175 | (Zarco-Tejada et al., 2014) | 347 |
| 9 | (Y. Huang et al., 2009) | 129 | (Ad˜ ao et al., 2017) | 335 |
| 10 | (Schmale III et al., 2008) | 119 | (Honkavaara et al., 2013a) | 331 |
| 11 | (Abd-Elrahman et al., 2005) | 79 | (Candiago et al., 2015) | 327 |
| 12 | (Techy et al., 2010) | 69 | (Xiang & Tian, 2011) | 307 |
| 13 | (Sullivan et al., 2007) | 51 | (Matese et al., 2015) | 303 |
| 14 | (Lumme et al., 2008) | 42 | (Gago et al., 2015) | 275 |
| 15 | (Gokto ¨ ǧan et al., 2010) | 40 | (Aasen et al., 2015a) | 269 |
Nan dezyèm peryòd la (2011-2021), rechèch Zhang and Kovacs (2012) ak Nex and Remondino (2014) te lakòz piblikasyon ki pi souvan site yo. Zhang ak Kovacs (2012) diskite ke agrikilti presizyon ta ka benefisye de mete ann aplikasyon teknik jeospasyo ak detèktè, tankou sistèm enfòmasyon jeyografik, GPS, ak teledeteksyon, pran varyasyon nan jaden an ak okipe yo pa anplwaye estrateji altènatif. Kòm yon chanjman nan agrikilti presizyon, adopsyon dron te anonse yon nouvo laj nan teledeteksyon, senplifye obsèvasyon ayeryen, kaptire done kwasans rekòt, kondisyon tè, ak zòn flite. Revizyon Zhang and Kovacs (2012) se fondamental paske li ofri apèsi sou UAV lè li revele itilizasyon ki deja egziste ak defi aparèy sa yo nan siveyans anviwònman an ak agrikilti presizyon, tankou limit platfòm ak kamera, defi pwosesis done, angajman kiltivatè, ak règleman aviyasyon. . Dezyèm lan
etid ki pi site soti nan Nex and Remondino (2014) revize eta a nan atizay la nan UAV pou kaptire, trete, ak analize imaj latè.
Travay yo te prezante tou yon apèsi sou plizyè platfòm UAV, aplikasyon, ak ka itilize, ki montre avansman dernye yo nan pwosesis imaj UAV. Nan agrikilti, kiltivatè yo ka itilize dron pou pran desizyon efikas pou reyalize ekonomi tan ak pri, resevwa yon dosye rapid ak presi sou domaj, epi antisipe pwoblèm posib. Kontrèman ak platfòm ayeryen konvansyonèl yo, UAV yo ka koupe depans operasyon yo ak diminye danje pou aksè nan kote ki difisil pandan y ap toujou prezève potansyèl gwo presizyon. Papye yo rezime avantaj divès kalite UAV, patikilyèman an tèm de presizyon ak rezolisyon.
Pami rès trèz piblikasyon ki pi site yo ant 2011 ak 2021, nou remake yon pi gwo konsantrasyon sou rechèch ki konekte ak aplikasyon dron nan misyon D (Bendig et al., 2014; Ma et al., 2017; Zarco-Tejada et al., 2014) , agrikilti presizyon (Candiago et al., 2015; Honkavaara et al., 2013a), vitikultur presizyon (Matese et al., 2015), evalyasyon estrès dlo (Gago et al., 2015), ak siveyans vejetasyon (Aasen et al., 2015). , XNUMXa). Nan kòmansman ane yo, chèchè yo te konsantre
plis sou devlopman sistèm UAV ki baze sou pri ki ba, ki lejè ak presi pou agrikilti; te rechèch ki pi resan konsantre plis sou revizyon aplikasyon UAV pou agrikilti ak sondaj jaden. An rezime, analiz sa a revele ke piblikasyon enfliyan yo te sitou bay revize etid anvan yo evalye sitiyasyon aktyèl syantifik ak teknolojik UAV yo ak devlope sistèm UAV pou sipòte agrikilti presizyon. Enteresan, nou pa t jwenn etid ki te anplwaye anpirik
metodoloji oswa etid ka deskriptif, ki konstitye yon diferans konesans enpòtan epi mande pou plis rechèch sou sijè sa a.
Analiz ko-sitasyon
Dapre Gmür (2006), analiz ko-sitasyon idantifye piblikasyon ki sanble ak gwoup yo. Egzamen ak anpil atansyon yon gwoup ka revele yon domèn rechèch komen nan mitan piblikasyon yo. Nou envestige ko-sitasyon literati ki gen rapò ak dron agrikòl pou ilistre matyè ki gen rapò ak detekte modèl entelektyèl piblikasyon yo. Nan sans sa a, Small (1973) rekòmande pou sèvi ak analiz cocitation pou etidye rechèch ki pi enfliyan ak seminè.
nan yon disiplin. Pou limite seri a nan atik ki pi enpòtan yo (Goyal & Kumar, 2021), nou fikse yon papòt ko-sitasyon nan 25, sa vle di ke de atik yo dwe te site ansanm nan lis referans 25 oswa plis piblikasyon diferan. Gwoupman an te fèt tou ak yon gwosè minimòm 1 ak san okenn metòd pou fusion pi piti grap ak pi gwo. Kòm yon rezilta, sis grap yo te pwodwi ki baze sou resanblans nan syans ak estrikti entelektyèl yo. Tablo 6 montre distribisyon piblikasyon yo nan chak gwoup.
Gwoup 1: Gwoup sa a gen dizwit dokiman pibliye apre Piblikasyon yo nan gwoup sa a diskite sou wòl dron nan sipòte siveyans anviwònman, jesyon rekòt, ak jesyon move zèb. Pou egzanp, Manfreda et al. (2018) bay yon apèsi sou rechèch aktyèl la ak aplikasyon UAV nan siveyans natirèl ekosistèm agrikòl epi diskite ke teknoloji a ofri anpil potansyèl pou amelyore siveyans anviwònman an drastikman ak diminye.
diferans ki egziste ant obsèvasyon jaden ak lè konvansyonèl ak teledeteksyon espasyèl. Sa a ka fè lè yo ofri nouvo kapasite pou amelyore rekipere tanporèl ak apèsi espasyal nan gwo zòn nan yon fason abòdab. UAV yo ka toujou santi anviwònman an epi voye done ki kapab lakòz yo bay antite entelijan, santralize / desantralize ki kontwole detèktè yo idantifye pwoblèm evantyèlman, tankou yon mank de maladi oswa deteksyon dlo (Padoua ´ et al., 2017). Adao ˜ et al. (2017) postule ke UAV yo ideyal pou evalye kondisyon plant yo lè yo kaptire yon gwo volim done anvan tout koreksyon ki gen rapò ak estati dlo, estimasyon byomass, ak evalyasyon vigè. UAV-monte detèktè yo ta ka tou deplwaye san pèdi tan nan kondisyon anviwònman apwopriye pou pèmèt kapti done alè-deteksyon aleka (Von Bueren et al., 2015). Pa mwayen dron, kiltivatè yo kapab fè aktivite agrikilti andedan kay la lè yo jwenn mezi ki soti nan prèske nenpòt kote nan espas ki genyen twa dimansyon nan anviwònman agrikilti andedan kay la (egzanp, sèr), kidonk asire kontwòl klima lokal yo ak siveyans plant yo (Roldan ´ et al. ., 2015). Nan kontèks presizyon
agrikilti, desizyon jesyon rekòt yo bezwen done egzat, serye ak yon rezolisyon tanporèl ak espasyal apwopriye (Gebbers & Adamchuk, 2010; Gevaert et al., 2015; Maes & Steppe, 2019). Pou rezon sa a, Agüera Vega et al. (2015) te itilize yon sistèm detèktè multispectral ki monte sou UAV pou jwenn imaj yon rekòt tounsòl pandan sezon k ap grandi a. Menm jan an tou, Huang et al. (2009) sonje ke deteksyon aleka ki baze sou UAVs ta ka fasilite mezi rekòt ak tè apati done espèk yo kolekte. Verger et al. (2014) devlope ak teste yon teknik pou estime yon endèks zòn vèt (GAI) ki soti nan mezi refleksyon UAV nan aplikasyon pou agrikilti presizyon, konsantre sou rekòt ble ak kolza. Se poutèt sa, dron bay nouvo posiblite pou rekipere enfòmasyon sou eta rekòt ak revizyon souvan ak rezolisyon espasyal segondè (Dong et al., 2019; Garzonio et al., 2017; H. Zheng et al., 2016).
Clustering nan piblikasyon enfliyan sou dron agrikòl.
| Seksyon | Gwo tèm | Referans |
| 1 | Siveyans anviwònman, rekòt jesyon, jesyon move zèb | (Ad˜ ao et al., 2017; Agüera Vega et al., 2015; de Castro et al., 2018; Gomez-Cand ´ on ´ et al., 2014; YB Huang et al., 2013; Khanal et al., 2017; Lopez-Granados, ´ 2011; Manfreda et al., 2018; P´ adua et al., 2017; Pena ˜ et al., 2013; Pèrez-Ortiz et al., 2015; Rasmussen et al., 2013, 2016; Torres-S' anchez et al., 2014; Torres-Sanchez, ´ Lopez-Granados, ´ & Pena, ˜ 2015; Verger et al., 2014; Von Bueren et al., 2015; C. Zhang & Kovacs, 2012) |
| 2 | Fenotip elwaye, sede estimasyon, modèl sifas rekòt, konte plant yo | (Bendig et al., 2013, 2014; Geipel et al., 2014; Gnadinger ¨ & Schmidhalter, 2017; Haghighattalab et al., 2016; Holman et al., 2016; Jin et al., 2017; W. Li et al., 2016; Maimaitijiang et al., 2017; Sankaran et al., 2015; Schirrmann et al., 2016; Shi et al., 2016; Yue et al., 2017; X. Zhou et al., 2017) |
| 3 | D' tèmik pou dlo, imaj miltispektral | (Baluja et al., 2012; Berni et al., 2009b; Berni et al., 2009a; Candiago et al., 2015; Gago et al., 2015; Gonzalez-Dugo et al., 2013, 2014; Grenzdorffer ¨ et al., 2008; Khaliq et al., 2019; Matese et al., 2015; Ribeiro-Gomes et al., 2017; Santesteban et al., 2017; Uto et al., 2013) |
| 4 | D 'hypersectral, espèk D ' | (Aasen et al., 2015a; Bareth et al., 2015; Hakala et al., 2013; Honkavaara et al., 2013a; Lucieer et al., 2014; Saari et al., 2011; Suomalainen et al., 2014) |
| 5 | Aplikasyon 3D-Mapping | (Jim´enez-Brenes et al., 2017; Nex & Remondino, 2014; Salamí et al., 2014; Torres-S' anchez, Lopez- ´ Granados, Serrano, et al., 2015; Zahawi et al., 2015; Zarco-Tejada et al., 2014) |
| 6 | Siveyans agrikilti | (SR Herwitz et al., 2004; Hunt et al., 2010; CCD Lelong et al., 2008; Primicerio et al., 2012; Xiang & Tian, 2011) |
Anplis de sa, dron yo itil pou travay difisil nan agrikilti, tankou kat raje. Imaj yo te kaptire pa aparèy yo te pwouve itilite yo pou deteksyon bonè move zèb nan jaden (de Castro et al., 2018; Jim´enez-Brenes et al., 2017; Lam et al., 2021; Lopez-Granados ´ et al., 2016; Rozenberg et al., 2021). Nan sans sa a, de Castro et al. (2018) postule ke fizyon simagri UAV ak analiz imaj ki baze sou objè (OBIA) te pèmèt pratikan yo simonte pwoblèm nan otomatize deteksyon bonè nan rekòt preri sezon bonè, ki se yon gwo etap pi devan nan rechèch raje. Menm jan an tou, Pena ˜ et al. (2013) fè remake ke itilizasyon imaj rezolisyon espasyal ultra-wo nan UAV ansanm ak yon pwosedi OBIA fè li posib jenere kat raje nan rekòt mayi bonè ki ta ka itilize nan planifikasyon aplikasyon an nan mezi kontwòl move zèb nan sezon an, yon travay pi lwen pase kapasite nan satelit ak imaj tradisyonèl ayeryèn. Konpare ak klasifikasyon imaj oswa algoritm deteksyon objè, teknik segmentasyon semantik yo pi efikas nan travay kat move zèb (J. Deng et al., 2020), konsa pèmèt kiltivatè yo detekte kondisyon jaden yo, bese pèt, ak amelyore pwodiksyon an pandan tout sezon kwasans lan (Ramesh). et al., 2020). Segmantasyon semantik ki baze sou aprantisaj pwofon kapab tou bay yon mezi egzat kouvèti vejetasyon nan imaj ayeryen wo rezolisyon (Ramesh et al., 2020; A. Zheng et al., 2022). Malgre potansyèl yo pou aleka
deteksyon pixel klasifikasyon, teknik segmentasyon semantik mande pou kalkil enpòtan ak yon memwa GPU prohibitively wo (J. Deng et al., 2020).
Baze sou aprantisaj machin ak UAV, P´erez-Ortiz et al. (2015) te sigjere yon apwòch kat raje pou bay estrateji kontwòl move zèb espesifik nan sit lè kiltivatè yo adopte kontwòl move zèb aparisyon bonè. Finalman, Rasmussen et al. (2013) mete aksan sou ke dron bay deteksyon pa chè ak gwo fleksibilite rezolisyon espasyal. An jeneral, piblikasyon yo nan gwoup sa a konsantre sou eksplore potansyèl UAV yo pou sipòte teledeteksyon, siveyans rekòt, ak kat move zèb. Lòt rechèch apwofondi nesesè pou plis mennen ankèt sou fason aplikasyon abèy nan siveyans anviwònman an, jesyon rekòt, ak kat raje ka reyalize agrikilti ki pi dirab (Chamuah & Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J . Su, Liu, et al., 2018) epi adrese pwoblèm gouvènans teknoloji sa a nan aplikasyon pou asirans rekòt (Basnet & Bang, 2018; Chamuah & Singh, 2019, 2022; Meinen & Robinson, 2021). Chèchè yo ta dwe konsantre sou validation mezi UAV kolekte ak teknik pwosesis efikas pou amelyore kalite ultim done trete (Manfreda et al., 2018). Anplis de sa, devlopman algorithm apwopriye ki rekonèt piksèl ki montre move zèb nan imaj dijital yo epi elimine background ki pa enpòtan pandan kat raje UAV nesesè (Gaˇsparovi´c et al., 2020; Hamylton et al., 2020; H. Huang et al. , 2018, 2020 Lopez- ´ Granados et al., 2016). Lòt rechèch sou adopsyon teknik segmentasyon semantik nan rekonesans plant, klasifikasyon fèy, ak kat maladi yo akeyi (Fuentes-Pacheco et al., 2019; Kerkech et al., 2020).
Gwoup 2. Piblikasyon yo nan gwoup sa a te konsantre sou plizyè aspè nan dron agrikòl. Ki gen rapò ak fenotip aleka, Sankaran et al. (2015) te revize potansyèl pou sèvi ak ba-altitid, wo-rezolisyon D ayeryen ak UAV pou fenotip rapid nan rekòt nan jaden an, epi yo diskite ke, kòm konpare ak platfòm deteksyon ki baze sou tè, ti UAV ak detèktè adekwa ofri plizyè avantaj. , tankou aksè pi fasil nan jaden an, done segondè rezolisyon, koleksyon done efikas,
evalyasyon rapid nan kondisyon yo kwasans jaden, ak pri operasyon ki ba. Sepandan, otè yo remake tou ke aplikasyon an efikas nan UAV pou fenotip jaden depann sou de eleman fondamantal, sètadi, karakteristik UAV (egzanp, sekirite, estabilite, pwezante, otonomi) ak karakteristik Capteur (egzanp, rezolisyon, pwa, longèdonn espèk, jaden. de vi). Haghighattalab et al. (2016) te pwopoze yon tiyo semi-otomatik tretman imaj pou rekipere done nivo konplo ki soti nan simagri UAV ak akselere pwosesis elvaj la. Holman et al. (2016) devlope yon wo
sistèm fenotip jaden debi ak mete aksan sou ke UAV kapab kolekte bon jan kalite, volumineuz, done fenotip ki baze sou jaden, e ke aparèy la efikas pou gwo zòn ak atravè diferan kote jaden.
Kòm estimasyon pwodiksyon an se yon enfòmasyon ekstrèmman vital, patikilyèman lè yo disponib alè, gen yon potansyèl pou UAV yo bay tout mezi jaden ak efikasite jwenn bon jan kalite done (Daakir et al., 2017; Demir et al., 2018). ; Enciso et al., 2019 Kulbacki et al., 2018; Nan sans sa a, Jin et al. (2012) te pran avantaj de simagri rezolisyon wo yo te jwenn pa UAVs nan altitid trè ba yo devlope ak evalye yon metòd pou estime dansite plant ble nan etap aparisyon an. Dapre otè yo, UAVs simonte limit yo nan sistèm rover ekipe ak kamera epi reprezante yon metòd ki pa pwogrese pou estime dansite plant nan rekòt, sa ki pèmèt kiltivatè yo reyalize gwo debi ki nesesè pou fenotip jaden endepandan de trafikabilite nan tè a. Li et al. (2017) te kolekte dè santèn de imaj stereo ak rezolisyon trè wo lè l sèvi avèk yon sistèm UAV ki baze sou pou estime paramèt mayi, ki gen ladan wotè canopy ak byomass anwo tè. Finalman, Yue et al. (2016) te jwenn ke wotè rekòt yo detèmine nan UAVs ka amelyore estimasyon byomass anwo tè (AGB).
Yon apwòch pou kontwole kwasans rekòt se lide pou devlope modèl sifas rekòt (Bendig et al., 2014, 2015; Holman et al., 2016; Panday, Shrestha, et al., 2020; Sumesh et al., 2021). Plizyè etid mete aksan sou posibilite imaj yo pran nan UAV pou pran wotè plant yo epi kontwole kwasans yo. Pou egzanp, Bendig et al. (2013) te dekri devlopman milti-tanporèl modèl sifas rekòt ak yon rezolisyon trè wo nan mwens pase 0.05 m lè l sèvi avèk UAV. Yo te vize detekte rekòt
varyab kwasans ak depandans li sou tretman rekòt, cultivar, ak estrès. Bendig et al. (2014) te itilize dron pou estime byomass fre ak sèk ki baze sou wotè plant ki soti nan modèl sifas rekòt epi li te jwenn ke, kontrèman ak platfòm ayeryèn ak optik lazè terès, imaj segondè rezolisyon ki soti nan dron ka siyifikativman ogmante presizyon nan modèl wotè plant pou kwasans diferan. etap. Nan menm sans lan, Geipel et al. (2014) te itilize dron nan rechèch yo pou jwenn simagri
ansanm done pou prediksyon pwodiksyon grenn mayi nan twa faz kwasans diferan soti nan kòmansman jiska mitan-sezon ak konkli ke konbinezon an nan modèl espèk ak espasyal ki baze sou imaj ayeryen ak modèl sifas rekòt se yon metòd apwopriye pou predi pwodiksyon mayi nan mitan sezon an. Finalman, Gnadinger ¨ ak Schmidhalter (2017) te egzamine itilite UAV nan fenotip presizyon epi mete aksan sou ke itilizasyon teknoloji sa a ta ka amelyore jesyon fèm epi pèmèt eksperimantasyon jaden pou rezon elvaj ak agronomi. An jeneral, nou obsève ke piblikasyon yo nan gwoup 2 konsantre sou avantaj prensipal yo nan UAVs nan aleka
fenotip, estimasyon sede, modèl sifas rekòt, ak konte plant. Etid nan lavni yo ka fouye pi fon lè yo devlope nouvo metòd pou fenotip aleka ki ka otomatize ak optimize pwosesis la nan done adistans detekte (Barabaschi et al., 2016; Liebisch et al., 2015; Mochida et al., 2015; S. Zhou et al. ., 2021). Anplis de sa, pèfòmans detèktè IoT ki monte sou dron ak konpwomi ki genyen ant depans yo, travay yo, ak presizyon nan estimasyon pwodiksyon bezwen fè rechèch nan la.
lavni (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue et al., 2018). Finalman, gen yon bezwen pou devlope metòd efikas tretman imaj ki ka jenere enfòmasyon serye, maksimize efikasite nan pwodiksyon agrikòl, epi minimize travay konte manyèl kiltivatè yo (RU Khan et al., 2021; Koh et al., 2021; Lin. & Guo, 2020; C. Zhang et al., 2020).
Gwoup 3. Piblikasyon yo nan gwoup sa a diskite sou diferan kalite sistèm imaj pou deteksyon remote resous agrikòl yo itilize sou platfòm UAV. Nan sans sa a, D tèmik pèmèt siveyans nan tanperati sifas yo anpeche domaj rekòt ak detekte estrès sechrès bonè (Awais et al., 2022; García-Tejero et al., 2018; Sankaran et al., 2015; Santesteban et al., 2017; Yeom, 2021). Baluja et al. (2012) te deklare ke itilizasyon kamera miltispektral ak tèmik abò a
UAV pèmèt chèchè yo jwenn imaj segondè rezolisyon ak evalye estati dlo pye rezen. Sa a ta ka itil pou devlope nouvo modèl orè dlo lè l sèvi avèk done teledeteksyon (Baluja et al., 2012). Paske nan
kapasite chaj limite nan UAVs, Ribeiro-Gomes et al. (2017) konsidere entegrasyon an nan kamera tèmik ki pa refwadi nan UAVS pou detèmine estrès dlo nan plant yo, sa ki fè sa a ki kalite UAVs pi efikas ak solid pase tradisyonèl satelit ki baze sou teledeteksyon ak UAVs ekipe ak refwadi kamera tèmik. Dapre otè yo, kamera tèmik ki pa refwadi yo pi lejè pase kamera ki refwadi, ki egzije kalibrasyon apwopriye. Gonzalez-Dugo et al. (2014) te montre ke simagri tèmik efektivman jenere kat espasyal nan endis estrès dlo rekòt pou evalye estati dlo ak quantifier estrès dlo nan mitan ak nan jaden Citrus. Gonzalez-Dugo et al. (2013) ak Santesteban et al. (2017) te envestige itilizasyon simagri tèmik UAV rezolisyon ki wo pou estime varyasyon estati dlo a nan yon jaden rezen komèsyal ak yon jaden rezen.
D 'multispectral te kapab bay done masiv an konparezon ak imaj tradisyonèl RGB (Wouj, vèt, ak ble) (Ad˜ ao et al., 2017; Navia et al., 2016). Done espèk sa yo, ansanm ak done espasyal, ta ka ede nan klasifikasyon, kat, previzyon, prediksyon, ak objektif deteksyon (Berni et al., 2009b). Dapre Candiago et al. (2015), UAV ki baze sou D 'multispectral te kapab kontribye twouve nan evalyasyon rekòt ak agrikilti egzak kòm yon resous serye ak efikas. Epitou,
Khaliq et al. (2019) te fè yon konparezon ant satelit ak UAV ki baze sou D miltispektral. Imaj ki baze sou UAV yo te lakòz yo te pi egzak nan dekri varyasyon jaden rezen osi byen ke kat vigè pou reprezante canopies rekòt. Nan yon bref, atik nan gwoup sa a diskite sou enkòporasyon detèktè tèmik ak miltispectral D nan UAV agrikòl. An konsekans, gen plis rechèch ki nesesè yo konprann ki jan tèmik ak miltispectral D ka entegre ak AI
teknik (egzanp, aprantisaj pwofon) pou detekte estrès plant (Ampatzidis et al., 2020; Ampatzidis & Partel, 2019; Jung et al., 2021; Santesteban et al., 2017; Syeda et al., 2021). Sa yo pral ede asire deteksyon pi efikas ak egzat ak siveyans kwasans plant, estrès, ak fenoloji (Buters et al., 2019; Cao et al., 2020; Neupane & BaysalGurel, 2021; L. Zhou et al., 2020). XNUMX).
Gwoup 4. Gwoup sa a konsiste de sèt papye ki vire toutotou wòl enpòtan nan imaj espèk ak imaj ipèspektral nan sipòte pratik agrikilti. D 'hyperspectral te etabli tèt li kòm yon metòd remote-deteksyon ki pèmèt evalyasyon quantitative nan sistèm latè a (Schaepman et al., 2009). Pou yo ka pi egzak, li pèmèt idantifikasyon nan materyèl sifas yo, quantification nan konsantrasyon (relatif), ak plasman nan pwopòsyon eleman sifas yo
nan piksèl melanje (Kirsch et al., 2018; Zhao et al., 2022). Nan lòt mo, pi wo rezolisyon espektral sistèm hyperspectral yo bay pèmèt estimasyon pi egzak nan divès paramèt, tankou pwopriyete vejetaryen oswa kontni dlo fèy (Suomalainen et al., 2014). Chèchè yo nan gwoup sa a te envestige plizyè aspè nan sistèm sa yo. Pami lòt moun, Aasen et al. (2015b) te ofri yon apwòch inik pou dériver enfòmasyon hyperspectral ki genyen twa dimansyon soti nan lejè
kamera snapshot yo itilize sou UAV pou siveyans vejetasyon. Lucieer et al. (2014) te diskite sou konsepsyon, devlopman, ak operasyon ayeryen nan yon roman UAS ipèspèktral ansanm ak kalibrasyon, analiz, ak entèpretasyon done imaj yo rasanble avèk li. Finalman, Honkavaara et al. (2013b) devlope yon apwòch pwosesis konplè pou imaj espèk FabryPerot entèferomètr ki baze sou e li montre itilizasyon li nan yon pwosedi estimasyon byomass pou agrikilti presizyon. Chemen potansyèl nan lavni pou gwoup aktyèl sa a gen ladan mete aksan sou bezwen pou amelyorasyon teknik nan teknoloji detèktè (Aasen et al., 2015b) osi byen ke bezwen an pou enkòpore ak amelyore teknoloji konplemantè, espesyalman gwo done ak analiz (Ang & Seng, 2021; Radoglou). -Grammatikis et al., 2020 Shakoor et al., 2019). Lèt la sitou soti nan done ki toujou ap grandi ki te pwodwi pa divès kalite detèktè aplike nan agrikilti entelijan (C. Li & Niu, 2020; A. Rejeb et al., 2022; Y. Su & Wang, 2021).
Gwoup 5. Piblikasyon ki nan gwoup sa a te egzamine aplikasyon 3Dmapping ki baze sou dron. Sèvi ak dron pou kat 3D ka soulaje travay konplèks la epi ogmante efikasite anpil (Torres-Sanchez et al., 2015). Senk atik yo nan gwoup la sitou konsantre sou aplikasyon pou siveyans plant yo. Pou egzanp, pou jwenn done ki genyen twa dimansyon sou zòn canopy, wotè pye bwa, ak volim kouwòn, Torres-Sanchez ´ et al. (2015) te itilize teknoloji UAV pou jenere modèl sifas dijital ak apwòch analiz imaj ki baze sou objè (OBIA). Pli lwen, Zarco-Tejada et al. (2014) mezire wotè pye bwa pa entegre UAV teknoloji ak twa dimansyon foto-rekonstriksyon metòd. Jim´enez-Brenes Lopez-Granados, ´ De Castro, et al. (2017) te demontre yon nouvo pwosesis pou siveyans milti-tanporèl, 3D nan plizyè douzèn pye oliv pa entegre teknoloji UAV ak metodoloji OBIA avanse. Chemen enteresan pou travay nan lavni nan gwoup sa a gen ladan swa amelyore aktyèl la
metodoloji (Zarco-Tejada et al., 2014) pou objektif modèl sifas dijital (Ajayi et al., 2017; Jaud et al., 2016), tankou OBIA (de Castro et al., 2018, 2020; Ventura et al., 2018). , 2015), ak rekonstriksyon foto oswa devlope nouvo metòd (Díaz-Varela et al., 2015; Torres-S´ anchez et al., XNUMX).
Gwoup 6. Gwoup sa a diskite sou wòl dron yo nan siveyans agrikòl. UAV yo ka konpleman ak simonte enpèfeksyon yo nan D satelit ak avyon. Pa egzanp, yo ta ka bay gwo rezolisyon tou pre an tan reyèl D ak mwens gaz oswa defi pilòt, sa ki lakòz siveyans konstan ak an tan reyèl ak amelyorasyon nan pran desizyon (S. Herwitz et al., 2004). Yon lòt kontribisyon kle UAV yo se kapasite yo pou bay done espesifik sou sit pou agrikilti presizyon oswa agrikilti sit espesifik kòm rezolisyon segondè yo, done detaye sou divès paramèt pèmèt kiltivatè yo divize tè a an pati omojèn epi trete yo kòmsadwa (Hunt et al. , 2010; CC Lelong et al., 2008; Primicerio et al., 2012). Sa yo siveyans agrikòl ki baze sou UAV ka sipòte siveyans sekirite alimantè ak pran desizyon (SR Herwitz et al., 2004). Pou avanse rechèch nan siveyans agrikòl, se pa sèlman amelyorasyon nan detèktè, UAVs, ak lòt teknoloji ki gen rapò ak kominikasyon yo ak metòd transfè done yo bezwen (Ewing et al., 2020; Shuai et al., 2019), men tou, entegre dron ak divès kalite. Teknoloji pou optimize travay diferan an relasyon ak agrikilti entelijan, tankou siveyans, siveyans agrikòl, ak pran desizyon, se yon gwo domèn rechèch potansyèl (Alsamhi et al., 2021; Popescu et al., 2020; Vuran et al., 2018). Nan sans sa a, IoT, WSN, ak gwo done ofri kapasite konplemantè enteresan (van der Merwe et al., 2020). Depans aplikasyon, pri ekonomi, efikasite enèji, ak sekirite done yo se pami zòn ki pa fè rechèch pou entegrasyon sa yo (Masroor et al., 2021).
Peyi ak enstitisyon akademik yo
Etap final la enkli envestigasyon peyi orijin ak afilyasyon akademik otè yo. Atravè analiz sa a, nou vize pi byen konprann distribisyon jeyografik entelektyèl ki kontribye nan aplikasyon yo nan dron nan agrikilti. Li enpòtan pou remake divèsite peyi ak enstitisyon akademik yo. Nan yon pèspektiv peyi, Etazini, Lachin, End ak Itali klase nan tèt lis la an tèm de kantite piblikasyon (Tablo 7). Kouran an
rechèch sou dron agrikòl lajman santre nan peyi Amerik di Nò ak Azyatik, sitou akòz gwo angajman yo nan aplikasyon pou agrikilti presizyon. Pou egzanp, nan USA a, mache a nan dron agrikòl te estime a 841.9 milyon USD nan ane a 2020, kontablite pou apeprè 30% nan pati nan mache mondyal la (ReportLinker, 2021). Klase kòm pi gwo ekonomi nan mond lan, yo prevwa Lachin nan rive nan yon gwosè mache apwoksimatif 2.6 milya dola nan ane 2027. Peyi sa a ap fè apèl kont pou dron agrikòl simonte pwoblèm pwodiktivite ak reyalize pi bon pwodiksyon, soulajman travay, ak mwens antre pwodiksyon. Sepandan, adopsyon teknoloji a nan Lachin tou kondwi pa faktè tankou gwosè popilasyon an ak bezwen pou inovasyon ak amelyore pratik jesyon rekòt ki deja egziste.
Top peyi ki pi pwodiktif ak inivèsite/òganizasyon ki kontribye nan
rechèch ki gen rapò ak abèy agrikòl.
| Klase | Peyi |
| 1 | USA |
| 2 | Lachin |
| 3 | peyi Zend |
| 4 | Itali |
| 5 | Espay |
| 6 | Almay |
| 7 | Brezil |
| 8 | Ostrali |
| 9 | Japon |
| 10 | Wayòm Ini |
| Klase | Inivèsite/ Òganizasyon |
| 1 | Chinwa Akademi nan Syans |
| 2 | Ministè Agrikilti Repiblik Pèp la nan Lachin |
| 3 | Siperyè Konsèy Envestigasyon Syantifik |
| 4 | Texas A & M Inivèsite |
| 5 | Lachin Agrikòl Inivèsite |
| 6 | Sèvis Rechèch Agrikòl USDA |
| 7 | CSIC la vle di Instituto de Agricultura Sostenible IAS |
| 8 | Purdue Inivèsite |
| 9 | Consiglio National delle ricerche |
| 10 | Sid Lachin Agrikòl Inivèsite |
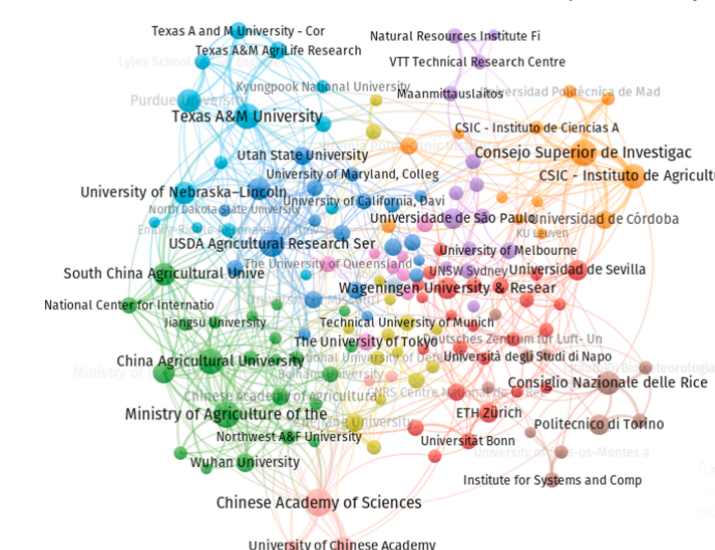
Soti nan yon inivèsite ak pèspektiv òganizasyonèl, Chinese Academy of Sciences tèt lis la an tèm de kantite piblikasyon, ki te swiv pa Ministè Agrikilti nan Repiblik Pèp la nan Lachin ak Consejo Superior de Investigaciones Scientíficas. Chinwa Akademi Syans reprezante pa otè Liao Xiaohan ak Li Jun; Han Wenting reprezante Ministè Agrikilti Repiblik Pèp la Lachin; epi Consejo Superior de Investigaciones Scientíficas reprezante pa Lopez-Granados, ´ F. ak Pena, ˜ Jos´e María S. Soti nan Etazini, inivèsite tankou Texas A&M University ak Purdue University jwenn yo.
mansyone. Inivèsite ki gen pi gwo kantite piblikasyon ak koneksyon yo montre nan Fig. 4. Anplis de sa, lis sa a gen ladann enstitisyon tankou Consiglio Nazionale delle Ricerche ak Consejo Superior de Investigaciones Scientíficas ki aktif nan rechèch syantifik, men yo pa enstitisyon akademik. .
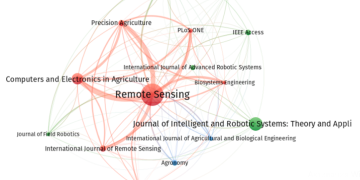
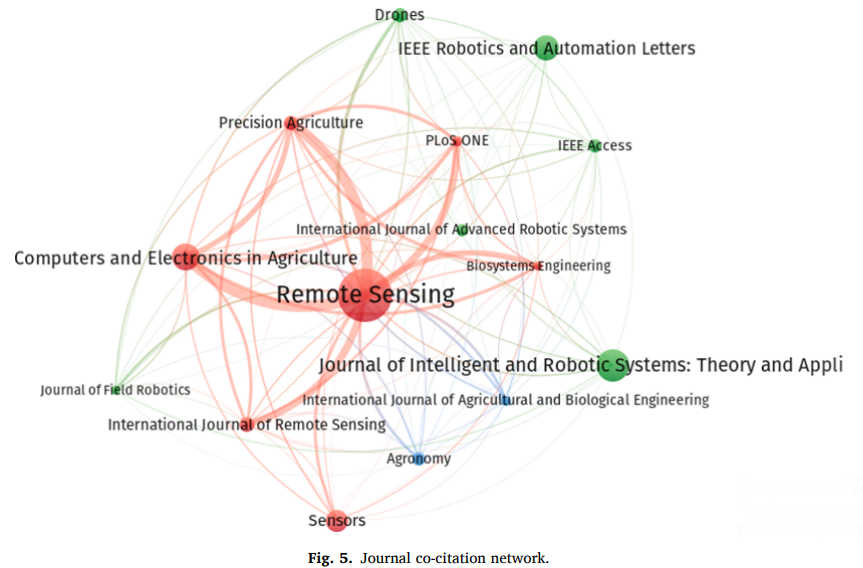
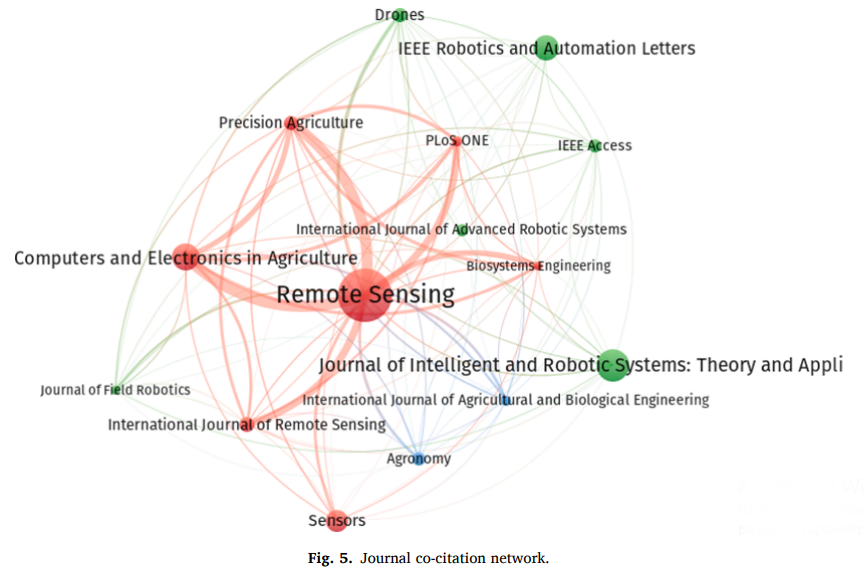
Seleksyon nou an te gen ladann yon gran varyete jounal, ki gen ladann nòmalman tout done ki disponib yo. Jan yo montre nan Tablo 8, Remote Sensing ak 258 atik klase nan tèt la, ki te swiv pa Journal of Intelligent and Robotic Systems: Theory and Applications with 126 and Computers and Electronics in Agriculture ak 98 atik. Pandan ke Remote Sensing se sitou konsantre sou aplikasyon an ak devlopman nan dron, Odinatè ak Elektwonik nan Agrikilti sitou kouvri pwogrè nan pyès ki nan konpitè òdinatè, lojisyèl, elektwonik, ak sistèm kontwòl nan agrikilti. Plòg kwaze zòn yo, tankou IEEE Robotics and Automation Letters ki gen 87 piblikasyon ak IEEE Aksè ak 34 piblikasyon, se tou premye plòg nan domèn nan. Premye kenz plòg yo te kontribye nan literati a ak 959 dokiman, ki se apeprè 20.40% nan tout piblikasyon yo. Yon analiz ko-sitasyon jounal pèmèt nou egzamine enpòtans ak resanblans ant piblikasyon yo. Analiz ko-sitasyon an bay twa gwoup, jan yo montre nan Fig. 5. Gwoup wouj la konsiste de jounal tankou Remote Sensing, Computer and Electronics in Agriculture, Sensors,
ak Jounal Entènasyonal Remote Sensing. Tout plòg sa yo se jounal ki gen anpil repitasyon nan domèn teledeteksyon ak agrikilti presizyon. Gwoup vèt la gen jounal ki fè fas ak robotik, tankou Journal of Intelligent and Robotic Systems: Theory and Applications, IEEE Robotics and Automation Letters, IEEE Access, and Drones. Plòg sa yo sitou pibliye papye sou automatisation epi yo itil pou enjenyè agrikòl. Gwoup final la fòme pa jounal ki gen rapò ak agronomi ak jeni agrikòl, tankou Agronomy ak Creole Journal of Agricultural and Byological Engineering.
Top 15 jounal nan rechèch ki gen rapò ak abèy agrikòl.
| Klase | Jounal | Konte |
| 1 | Kèk Remote | 258 |
| 2 | Journal of Intelligent and Robotic Systems: Teyori ak Aplikasyon | 126 |
| 3 | Odinatè ak Elektwonik nan Agrikilti | 98 |
| 4 | IEEE Robotics ak Otomatik Lèt | 87 |
| 5 | Detèktè | 73 |
| 6 | Jounal Entènasyonal nan teledeteksyon | 42 |
| 7 | Precision Agrikilti | 41 |
| 8 | Dron | 40 |
| 9 | Agronomi | 34 |
| 10 | Aksè IEEE | 34 |
| 11 | Jounal Entènasyonal Sistèm avanse Robotics | 31 |
| 12 | Jounal Entènasyonal Jeni Agrikòl ak Byolojik | 25 |
| 13 | PLoS YON | 25 |
| 14 | Journal of Field Robotics | 23 |
| 15 | Jeni Biosystems | 23 |
konklizyon
Rezime
Nan etid sa a, nou te rezime ak analize rechèch ki deja egziste sou dron agrikòl. Aplike plizyè teknik bibliyometrik, nou fè efò pou nou jwenn yon pi bon konpreyansyon sou estrikti entelektyèl rechèch ki gen rapò ak dron agrikòl la. An rezime, revizyon nou an ofri plizyè kontribisyon nan idantifye ak diskite mo kle nan literati a, revele grap konesans pandan y ap fòme kominote semantik ki sanble nan domèn nan dron, dekri rechèch pi bonè, ak sijere direksyon rechèch nan lavni. Anba a, nou dekri konklizyon prensipal yo nan revizyon an sou devlopman nan dron agrikòl:
• Literati a an jeneral te grandi rapidman epi atire atansyon menmen pandan dènye dekad la, jan sa endike nan ogmantasyon nan kantite atik apre 2012. Menmsi domèn konesans sa a poko rive jwenn tout matirite li (Barrientos et al., 2011; Maes). & Steppe, 2019), plizyè kesyon toujou san repons. Pou egzanp, sèvis piblik dron nan agrikilti andedan kay la toujou louvri pou deba (Aslan et al., 2022; Krul et al., 2021; Rold'an et al., 2015). Konpleksite sèn nan jaden yo ak diferan sikonstans imaj yo (egzanp, lonbraj ak ekleraj) ta ka lakòz yon pi gwo divèjans espèk nan klas la (Yao et al., 2019). Menm nan faz rechèch pita yo, chèchè yo te defi pou detèmine plan vòl optimal selon senaryo patikilye ak kalite imaj obligatwa (Soares et al., 2021; Tu et al.,
2020).
• Nou remake ke jaden an te pwogrese soti nan devlope sistèm UAV efikas nan enkòpore teknik AI, tankou aprantisaj machin ak aprantisaj pwofon nan konsepsyon dron agrikòl (Bah et al., 2018; Kitano et al., 2019; Maimaitijiang et al. , 2020; Mazzia et al., 2020; Tetila et al., 2020).
• Rechèch sou dron agrikòl yo te diskite sitou sou teledeteksyon nan eksplore potansyèl teknoloji a nan siveyans anviwònman an, jesyon rekòt, ak jesyon move zèb (gwoup 1) osi byen ke fenotip aleka ak estimasyon pwodiksyon an (grap 2). Yon seri etid enfliyan sou dron agrikòl gen ladan Austin (2010), Berni et al. (2009)a, Herwitz et al. (2004), Nex and Remondino (2014), ak Zhang and Kovacs (2012). Etid sa yo devlope baz konseptyèl ekspresyon rechèch ki gen rapò ak abèy nan yon kontèks agrikilti.
• Anrapò ak metodoloji a, nou te obsève ke pi fò nan rechèch ki fèt jiskaprezan yo te konpoze swa de konsepsyon sistèm, konseptyèl, oswa syans ki baze sou revizyon (Inoue, 2020; Nex & Remondino, 2014; P´erez-Ortiz et al. , 2015; Yao et al., 2019). Nou remake tou yon mank de metòd anpirik, kalitatif, ak ki baze sou etid ka nan travay nan envestigasyon dron agrikòl.
• Dènyèman, sijè ki gen rapò ak agrikilti presizyon, teknik AI, vitikultur presizyon, ak evalyasyon estrès dlo te atire atansyon sibstansyèl (Espinoza et al., 2017; Gomez-Cand ´ on ´ et al., 2016; Matese et al., 2015; Matese & Di Gennaro, 2018, 2021 Z. Zhou et al., 2021). Egzamen ak anpil atansyon nan gwoup rechèch nan de epòk separe, 1990–2010 ak 2011–2021, revele pwogrè nan estrikti entelektyèl domèn nan. Peryòd 1990 a 2010 te konstitye devlopman nosyon santral ak konsèp dron, ki evidan nan diskisyon sou konsepsyon, devlopman ak aplikasyon UAV. Nan dezyèm epòk la, konsantre rechèch la elaji sou etid anvan yo, fè yon efò sentèz ka itilize UAV nan agrikilti. Nou jwenn tou anpil etid ki diskite sou aplikasyon dron nan travay imaj ak agrikilti presizyon.
| Klase | Jounal | Konte |
| 1 | Kèk Remote | 258 |
| 2 | Journal of Intelligent and Robotic Systems: Teyori ak | 126 |
| Aplikasyon | ||
| 3 | Odinatè ak Elektwonik nan Agrikilti | 98 |
| 4 | IEEE Robotics ak Otomatik Lèt | 87 |
| 5 | Detèktè | 73 |
| 6 | Jounal Entènasyonal nan teledeteksyon | 42 |
| 7 | Precision Agrikilti | 41 |
| 8 | Dron | 40 |
| 9 | Agronomi | 34 |
| 10 | Aksè IEEE | 34 |
| 11 | Jounal Entènasyonal Sistèm avanse Robotics | 31 |
| 12 | Jounal Entènasyonal Jeni Agrikòl ak Byolojik | 25 |
| 13 | PLoS YON | 25 |
| 14 | Journal of Field Robotics | 23 |
| 15 | Jeni Biosystems | 22 |
enplikasyon
Revizyon bibliyometrik nou an te fèt ak fèt ak entelektyèl, kiltivatè, ekspè agrikòl, konsiltan rekòt, ak konsèpteur sistèm UAV nan tèt ou. Dapre pi bon konesans otè yo, sa a se youn nan premye revizyon orijinal yo ki te antreprann yon analiz bibliyometrik pwofondè sou
aplikasyon dron nan agrikilti. Nou te fè yon revizyon konplè nan kò konesans sa a, anplwaye sitasyon ak ko-sitasyon analiz piblikasyon yo. Tantativ nou yo pou dekri estrikti entelektyèl rechèch dron yo ofri tou nouvo lide pou akademik yo. Yon revizyon atansyon sou mo kle yo itilize sou tan revele otspo yo ak zòn rechèch fokal nan literati ki gen rapò ak abèy la. Anplis de sa, nou prezante yon lis etid ki pi site yo pou idantifye travay rechèch ki gen plis enpak ki fèt nan domèn nan. Idantifikasyon atik ak mo kle yo ta ka kidonk bay yon pwen depa solid pou dekouvri plizyè avni pou etid nan lavni.
Sa ki enpòtan, nou te revele gwoup ki klasifye travay konparab ak elabore sou rezilta yo. Etid yo klase nan grap ede nan konprann estrikti entelektyèl rechèch UAV. Miyò, nou dekouvri yon mank de etid ki mennen ankèt sou faktè adopsyon dron yo
ak baryè nan aktivite agrikòl (gade Tablo 9). Chèchè nan lavni yo ta ka adrese diferans potansyèl sa a lè yo fè envestigasyon anpirik ki evalye faktè adopsyon dron yo nan diferan aktivite agrikòl ak kondisyon klimatik. Anplis de sa, rechèch ki baze sou etid ka konsènan efikasite dron yo ta dwe apiye ak done reyèl ki soti nan jaden an. Epitou, enplike kiltivatè yo ak administratè yo nan rechèch akademik yo ta avantaje pou avansman teyorik ak pratik rechèch dron. Nou te kapab tou idantifye chèchè ki pi enpòtan yo ak kontribisyon yo, sa ki gen anpil valè paske konsyans sou dènye travay seminal yo ka ofri kèk konsèy pou pwochen efò akademik yo.
Table 9
Baryè adopsyon UAV.
| Baryè | Deskripsyon |
| Done sekirite | Sibè sekirite se yon gwo defi pou aplike Solisyon IoT (Masroor et al., 2021). |
| Entèoperabilite ak entegrasyon | Divès teknoloji tankou UAV, WSN, IoT, elatriye. ta dwe entegre ak transmèt done ki ogmante nivo konpleksite (Alsamhi et al., 2021; Popescu et al., 2020; Vuran et al., 2018). |
| Depans aplikasyon yo | Sa a se spesyalman ka a pou ti kiltivatè yo ak pou entegre plizyè teknoloji dènye kri ( Masroor et al., 2021). |
| Konesans travay ak ekspètiz | Pilòt abèy kalifye yo bezwen pou opere UAV. Epitou, mete ann aplikasyon divès kalite dènye kri teknoloji mande pou travayè kalifye (YB Huang et al., 2013; Tsouros et al., 2019). |
| Pouvwa motè ak vòl dire | Dwòn pa ka opere pou èdtan long ak kouvri gwo zòn (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| Estabilite, fyab, ak manyablite | Drones yo pa estab pandan move tan (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| Payload limit ak bon jan kalite detèktè yo | Drones sèlman ka pote chay limite mennen nan kapasite pou chaje pi ba detèktè kalite (Nebiker et al., 2008). |
| Règleman | Kòm dron yo ka danjere tou, gen grav règleman nan kèk zòn (Hardin & Jensen, 2011; Laliberte & Rango, 2011). |
| Konesans kiltivatè yo ak enterè | Kòm lòt teknoloji dènye kri, dron yo ' aplikasyon siksè bezwen ekspètiz ak tou akonpaye ak ensètitid (Fisher et al., 2009; Lambert et al., 2004; Stafford, 2000). |
Piske gen yon bezwen konstan pou sèvi ak resous ki disponib yo avèk efikasite pou maksimize pwodiksyon an, kiltivatè yo ka pran avantaj de dron pou asire analiz rapid, egzat, ak pri efikas nan jaden yo. Teknoloji a ka ede fèmye yo detèmine kondisyon rekòt yo epi evalye eta dlo, etap matrité, ensèk ensèk, ak bezwen nitrisyonèl. Kapasite teledeteksyon dron yo ka bay kiltivatè yo done enpòtan pou antisipe pwoblèm nan yon etap bonè epi fè entèvansyon apwopriye san pèdi tan. Sepandan, benefis ki genyen nan teknoloji a ka sèlman reyalize si defi yo byen adrese. Nan limyè a
pwoblèm aktyèl konsènan sekirite done, pwoblèm teknoloji detèktè (egzanp, fyab la oswa presizyon nan mezi), konpleksite nan entegrasyon, ak gwo depans aplikasyon, etid nan lavni yo dwe egzaminen tou teknik, ekonomik, ak posibilite operasyonèl nan entegre dron agrikòl ak lòt koupe- teknoloji kwen.
Limit
Etid nou an gen plizyè limit. Premyèman, rezilta yo detèmine pa piblikasyon yo chwazi pou analiz final la. Li difisil pou pran tout etid ki enpòtan ki gen rapò ak dron agrikòl, patikilyèman sa yo ki pa endis nan baz done Scopus la. Anplis de sa, pwosesis koleksyon done yo limite a sa sèlman anviwònman mo kle rechèch yo, ki ka pa enklizif epi ki mennen nan konklizyon enkonklizyon. Kidonk, etid nan lavni bezwen peye plis atansyon sou pwoblèm ki kache nan koleksyon done yo fè
konklizyon ki pi serye. Yon lòt limit konsène nouvo piblikasyon ki gen yon ti kantite sitasyon. Analiz bibliyometrik la gen patipri pou piblikasyon pi bonè yo paske yo gen tandans resevwa plis sitasyon pandan ane yo. Dènye etid yo bezwen yon sèten kantite tan pou atire atansyon ak akimile sitasyon yo. Kontinwe, etid resan ki pote yon chanjman paradigm pa ta klase nan dis pi gwo travay enfliyan yo. Limit sa a se souvan nan egzamen an nan domèn rechèch rapidman émergentes tankou dron agrikòl. Kòm nou te konsilte Scopus yo etidye literati a pou travay sa a, chèchè nan lavni ta ka konsidere diferan
baz done, tankou Web of Science ak IEEE Xplore, pou elaji orizon an ak amelyore estrikti rechèch la.
Etid bibliyometrik potansyèl yo ka konsidere lòt sous konesans enpòtan tankou papye konferans, chapit, ak liv pou jenere nouvo lide. Malgre kat ak mennen ankèt sou piblikasyon mondyal sou dron agrikòl, rezilta nou yo pa t revele rezon ki fè yo dèyè rezilta akademik inivèsite yo. Sa ouvri wout la nan yon domèn rechèch nouvo nan kalitatif eksplike poukisa kèk inivèsite yo pi pwodiktif pase lòt lè li rive rechèch sou agrikòl.
dron. Anplis de sa, etid nan lavni ta ka bay apèsi sou potansyèl dron yo pou ogmante dirab agrikilti nan plizyè fason tankou siveyans anviwònman an, jesyon rekòt, ak kat raje jan sa endike pa plizyè chèchè (Chamuah & Singh, 2019; Islam et al., 2021; Popescu et al., 2020 J. Su, Liu, et al., 2018b). Piske analiz tèks la pa t posib akòz gwo kantite papye chwazi yo, gen yon nesesite pou revize literati sistematik ki egzamine
metòd rechèch yo itilize ak patisipasyon kiltivatè yo nan etid anvan yo. Nan ti bout tan, analiz nou an nan rechèch abèy ekspoze lyen yo envizib nan kò konesans sa a. Se poutèt sa, revizyon sa a ede dekouvri relasyon ki genyen ant piblikasyon yo epi eksplore estrikti entelektyèl domèn rechèch la. Li dekri tou lyen ki genyen ant divès aspè nan literati a, tankou mo kle otè yo, afilyasyon, ak peyi yo.
Deklarasyon enterè konpetitif
Otè yo deklare ke yo pa gen okenn enterè konpetitif li te ye oswa relasyon pèsonèl ki ta ka parèt enfliyanse travay la rapòte nan papye sa a.
Nan Apendis 1
TITLE-ABS-KEY (((abèy* OSWA "veyikil ayeryen san ekipe" OSWA uav* OSWA "sistèm avyon san ekipe)” OSWA uas OSWA "Avyon ki telepilote”) AK (agrikilti OSWA agrikilti OSWA agrikilti OSWA kiltivatè))) AK (EKLÈ (PUBYEAR, 2022)) AK (LIMITE-A (LANG, “Angle”).
Referans
Aasen, H., Burkart, A., Bolten, A., Bareth, G., 2015. Jenere enfòmasyon 3D ipèspektral ak kamera snapshot UAV ki lejè pou siveyans vejetasyon: soti nan
kalibrasyon kamera nan asirans kalite. ISPRS J. Photogramm. Remote Sens. 108, 245–259. https://doi.org/10.1016/j.isprsjprs.2015.08.002.
Abd-Elrahman, A., Pearlstine, L., Percival, F., 2005. Devlopman algorithm rekonesans modèl pou deteksyon otomatik zwazo nan simagri veyikil ayeryen san ekipe.
Sondaj. Tè Enfòme. Sci. 65 (1), 37–45.
Abdollahi, A., Rejeb, K., Rejeb, A., Mostafa, MM, Zailani, S., 2021. Rezo detèktè san fil nan agrikilti: Sur nan analiz bibliyometrik. Dirab 13 (21),
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M., Evalyasyon diferan metòd pou deteksyon lonbraj nan simagri optik segondè rezolisyon ak evalyasyon enpak lonbraj sou kalkil nan NDVI, ak evapotranspirasyon. Irrig. Sci. 37 (3), 407–429. https://doi.org/10.1007/s00271-018-0613-9.
Adao, ˜ T., Hruˇska, J., Padoua, ´ L., Bessa, J., Peres, E., Morais, R., Sousa, JJ, 2017. D 'hyperspectral: yon revizyon sou detèktè UAV ki baze sou, done pwosesis ak
aplikasyon pou agrikilti ak forè. Remote Sensing 9 (11). https://doi.org/ 10.3390/rs9111110.
Agüera Vega, F., Ramírez, FC, Saiz, MP, Rosúa, FO, 2015. Imaj milti-tanporèl lè l sèvi avèk yon veyikil ayeryen san ekipe pou kontwole yon rekòt tounsòl. Biosyst. Eng.
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017. Jenerasyon modèl elevasyon dijital egzat soti nan UAV akeri imaj ki ba pousantaj sipèpoze. Ent.
J. Remote Sens 38 (8–10), 3113–3134. https://doi.org/10.1080/ 01431161.2017.1285085.
Ali, I., Greifeneder, F., Stamenkovic, J., Neumann, M., Notarnicola, C., 2015. Revizyon apwòch aprantisaj machin pou rekipere biomass ak imidite tè soti nan done deteksyon aleka. Remote Sensing 7 (12), 16398–16421.
Alsamhi, SH, Afghah, F., Sahal, R., Hawbani, A., Al-qaness, MAA, Lee, B., Guizani, M., Green internet of things using UAVs in B5G networks: A review of applications
ak estrateji. Anons. Hoc. Netw. 117, 102505 https://doi.org/10.1016/j. adhoc.2021.102505.
Al-Thani, N., Albuainain, A., Alnaimi, F., Zorba, N., 2020. Drones pou siveyans bèt mouton. Nan: 20yèm Konferans Electrotechnical IEEE Mediterane. https://doi.
org/10.1109/MELECON48756.2020.9140588.
Ampatzidis, Y., Partel, V., 2019. UAV ki baze sou fenotip segondè debi nan Citrus itilize D Multispectral ak entèlijans atifisyèl. Deteksyon Remote 11 (4), https://doi.org/10.3390/rs11040410.
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: Aplikasyon ki baze sou nwaj pou trete, analize ak vizyalize done UAV yo kolekte pou aplikasyon pou agrikilti presizyon ki itilize entèlijans atifisyèl. Konpitè. Elektwon. Agrik. 174, 105457 https://doi. org/10.1016/j.compag.2020.105457.
Ang, K.-L.-M., Seng, JKP, 2021. Gwo done ak aprantisaj machin ak enfòmasyon hyperspectral nan agrikilti. Aksè IEEE 9, 36699–36718. https://doi.org/10.1109/
ACCESS.2021.3051196.
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. Revizyon: teknoloji presizyon agrikilti bèt nan sistèm bèt ki baze sou patiraj. Animal 16 (1), https://doi.org/10.1016/j.animal.2021.100429.
Armenta-Medina, D., Ramirez-Delreal, TA, Villanueva-Vasquez, ´ D., Mejia-Aguirre, C., Tandans sou enfòmasyon avanse ak teknoloji kominikasyon pou
amelyore pwodiktivite agrikòl: yon analiz bibliyometrik. Agronomi 10 (12), Atik 12. https://doi.org/10.3390/agronomy10121989.
Armstrong, I., Pirrone-Brusse, M., Smith, A., Jadud, M., 2011. Gator vole a: nan direksyon pou robotik ayeryen nan occam-π. Komin. Achitek Pwosesis. 2011, 329–340. https://doi. org/10.3233/978-1-60750-774-1-329.
Arora, SD, Chakraborty, A., 2021. Estrikti entelektyèl nan rechèch konsomatè plenyen konpòtman (CCB): Yon analiz bibliyometrik. J. Biznis Res. 122, 60–74.
Aslan, MF, Durdu, A., Sabanci, K., Ropelewska, E., Gültekin, SS, 2022.
Yon sondaj konplè sou etid resan yo ak UAV pou agrikilti presizyon nan jaden ouvè ak sèr. Appl. Sci. 12 (3), 1047. https://doi.org/10.3390/
app12031047.
Atkinson, JA, Jackson, RJ, Bentley, AR, Ober, E., & Wells, DM (2018). Fenotip jaden pou tan kap vini an. Nan Annual Plant Reviews sou Entènèt (pp. 719–736). Jan
Wiley & Sons, Ltd doi: 10.1002/9781119312994.apr0651.
Austin, R., 2010. Sistèm avyon san ekipe: UAVS Design, Devlopman ak Deplwaman. Nan: Sistèm avyon san ekipe: UAVS Design, Devlopman ak
Deplwaman. John Wiley ak pitit gason. https://doi.org/10.1002/9780470664797.
Awais, M., Li, W., Cheema, MJM, Zaman, QU, Shaheen, A., Aslam, B., Zhu, W., Ajmal, M., Faheem, M., Hussain, S., Nadeem, AA, Afzal, MM, Liu, C., 2022. UAV ki baze sou deteksyon remote nan estrès plant imajine lè l sèvi avèk gwo rezolisyon Capteur tèmik pou pratik agrikilti dijital: yon meta-revizyon. Ent. J. Environ. Sci. Teknoloji. https://doi.
org/10.1007/s13762-021-03801-5.
Bacco, M., Berton, A., Ferro, E., Gennaro, C., Gotta, A., Matteoli, S., Paonessa, F., Ruggeri, M., Virone, G., Zanella, A., 2018. Agrikilti entelijan: Opòtinite, defi
ak teknoloji ki pèmèt yo. 2018 IoT vètikal ak. Topical Summit on Agriculture -Toscane (IOT Toscane) 1–6. https://doi.org/10.1109/IOTTUSCANY.2018.8373043.
Bah, MD, Hafiane, A., Canals, R., 2018. Aprantisaj pwofon ak etikèt done san sipèvizyon pou deteksyon raje nan rekòt liy nan imaj UAV. Deteksyon Remote 10 (11), 1690.
https://doi.org/10.3390/rs10111690.
Baldi, S., 1998. Normative versus social constructist processes in the allocation of citations: a network-analytic model. Am. Sosyol. Rev. 63 (6), 829–846. https://doi.
org/10.2307/2657504.
Baluja, J., Diago, MP, Balda, P., Zorer, R., Meggio, F., Morales, F., Tardaguila, J., 2012. Evalyasyon nan varyasyon estati dlo jaden rezen pa tèmik ak miltispektral
simagri lè l sèvi avèk yon veyikil ayeryen san ekipe (UAV). Irrig. Sci. 30 (6), 511–522. https://doi.org/10.1007/s00271-012-0382-9.
Barabaschi, D., Tondelli, A., Desiderio, F., Volante, A., Vaccino, P., Val`e, G., Cattivelli, L., Pwochen jenerasyon elvaj. Plant Sci. 242, 3–13. https://doi.org/10.1016/j.
plantsci.2015.07.010.
Barbedo, JGA, Koenigkan, LV, 2018. Pèspektiv sou itilizasyon sistèm ayeryen san ekipe pou kontwole bèt yo. Pespektiv Agrik. 47 (3), 214–222. https://doi.org/10.1177/0030727018781876.
Bareth, G., Aasen, H., Bendig, J., Gnyp, ML, Bolten, A., Jung, A., Michels, R., Soukkamaki, ¨ J., 2015. Ipèrspektral ki ba-pwa ak UAV ki baze sou kamera plen ankadreman
pou siveyans rekòt: Konparezon espektral ak mezi spectroradiometer pòtab. Photogrametrie, Fernerkundung, Geoinformation 2015 (1), 69–79.
https://doi.org/10.1127/pfg/2015/0256.
Barrientos, A., Colorado, J., del Cerro, J., Martinez, A., Rossi, C., Sanz, D., Valente, J., Ayeryen teledeteksyon nan agrikilti: yon apwòch pratik nan kouvèti asirans zòn
ak planifikasyon chemen pou flòt mini robo ayeryen. J. Field Rob. 28 (5), 667–689. https://doi.org/10.1002/rob.20403.
Basiri, A., Mariani, V., Silano, G., Aatif, M., Iannelli, L., Glielmo, L., 2022. Yon sondaj sou aplikasyon algoritm planifikasyon chemen pou UAV milti-rotor nan presizyon
agrikilti. J. Navigasyon. 75 (2), 364–383.
Basnet, B., Bang, J., 2018. Eta-of-atizay la nan agrikilti konesans entansif: yon revizyon sou sistèm deteksyon aplike ak analiz done. J. Sens 2018, 1–13.
Bendig, J., Bolten, A., Bareth, G., 2013. UAV ki baze sou D pou milti tanporèl, modèl sifas rekòt trè wo rezolisyon pou kontwole varyasyon kwasans rekòt. Photogrametrie, Fernerkundung, Geoinformation 2013 (6), 551–562. https://doi. org/10.1127/1432-8364/2013/0200.
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. Estimasyon byomass nan lòj lè l sèvi avèk modèl sifas rekòt (CSMs) ki sòti nan UAV ki baze sou D RGB. Remote Sensing 6 (11), 10395–10412.
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, ML, Bareth, G., 2015. Konbine wotè plant UAV ki baze sou sifas rekòt. modèl,
endis vejetasyon vizib, ak tou pre enfrawouj pou siveyans byomass nan lòj. Ent. J. Appl. Latè Obs. Geoinf. 39, 79–87. https://doi.org/10.1016/j.jag.2015.02.012.
Berni, JA, Zarco-Tejada, PJ, Sepulcre-Canto, ´ G., Fereres, E., Villalobos, F., 2009a. Katograf konduktivite canopy ak CWSI nan jaden oliv lè l sèvi avèk rezolisyon segondè
tèmik simagri deteksyon remote. Remote Sens. Environ. 113 (11), 2380–2388. https://doi.org/10.1016/j.rse.2009.06.018.
Berni, JA, Zarco-Tejada, PJ, Suarez, ´ L., Fereres, E., 2009b. Tèmik ak bande etwat miltispektral teledeteksyon pou siveyans vejetasyon nan yon veyikil ayeryen san ekipe. IEEE Trans. Geosci. Remote Sens 47 (3), 722–738.
Bouzembrak, Y., Klüche, M., Gavai, A., Marvin, HJP, 2019. Entènèt bagay yo nan sekirite manje: revizyon literati ak analiz bibliyometrik. Tandans Manje Sci. Teknoloji. 94,54–64. https://doi.org/10.1016/j.tifs.2019.11.002.
Brewster, C., Roussaki, I., Kalatzis, N., Doolin, K., Ellis, K., 2017. IoT nan agrikilti: Desine yon pilòt gwo echèl nan tout Ewòp. Kominote IEEE. Mag. 55 (9), 26–33.
Buters, TM, Belton, D., Cross, AT, 2019. Suivi UAV milti-detèktè nan plant endividyèl ak kominote plant ak presizyon milimèt. Drones 3 (4), 81.
https://doi.org/10.3390/drones3040081.
Candiago, S., Remondino, F., De Giglio, M., Dubbini, M., Gattelli, M., 2015. Evalye imaj miltispektral ak endis vejetasyon pou aplikasyon pou agrikilti presizyon soti nan imaj UAV. Deteksyon Remote 7 (4), 4026–4047. https://doi.org/10.3390/rs70404026.
Cao, Y., Li, GL, Luo, YK, Pan, Q., Zhang, SY, 2020. Siveyans endikatè kwasans bètrav sik lè l sèvi avèk endèks vejetasyon lajè dinamik (WDRVI) ki sòti nan UAV
imaj miltispektral. Konpitè. Elektwon. Agrik. 171, 105331 https://doi.org/10.1016/j.compag.2020.105331.
Casillas, J., Acedo, F., 2007. Evolisyon estrikti entelektyèl nan literati biznis familyal: yon etid bibliyometrik nan FBR. Biznis Fanmi Rev. 20 (2), 141–162.
Cen, H., Wan, L., Zhu, J., Li, Y., Li, X., Zhu, Y., Weng, H., Wu, W., Yin, W., Xu, C., Bao, Y., Feng, L., Shou, J., He, Y., 2019. Siveyans dinamik nan byomass nan diri anba
diferan tretman nitwojèn lè l sèvi avèk yon UAV ki lejè ak kamera imaj-ankadreman doub. Plant Method 15 (1), 32. https://doi.org/10.1186/s13007-019-
0418-8.
Chamuah, A., Singh, R., 2019. Sekirize dirab nan agrikilti Endyen atravè UAV sivil: yon pèspektiv inovasyon responsab. SN Aplikasyon. Sci. 2 (1), 106. https://
doi.org/10.1007/s42452-019-1901-6.
Chamuah, A., Singh, R., 2022. Gouvènans responsab nan inovasyon sivil san ekipe (UAV) pou aplikasyon asirans rekòt Endyen. J. Responsab
Teknoloji. 9, 100025 https://doi.org/10.1016/j.jrt.2022.100025.
Chen, A., Orlov-Levin, V., Meron, M., 2019. Aplike segondè rezolisyon vizib-chanèl D ayeryen nan canopy rekòt nan jesyon irigasyon presizyon. Agrik. Dlo
Jere. 216, 196–205. https://doi.org/10.1016/j.agwat.2019.02.017.
Daakir, M., Pierrot-Deseilligny, M., Bosser, P., Pichard, F., Thom, C., Rabot, Y., Martin, O., 2017. UAV ki lejè ak fotogrametri sou tablo ak pozisyon GPS yon sèl frekans. pou aplikasyon pou metroloji. ISPRS J. Photogramm. Remote Senses 127, 115–126. https://doi.org/10.1016/j.isprsjprs.2016.12.007.
Dawaliby, S., Aberkane, A., Bradai, A., 2020. Platfòm IoT ki baze sou Blockchain pou jesyon operasyon dron otonòm. Nan: Pwosedi 2yèm ACM la
Atelye MobiCom sou Kominikasyon san fil ki asistans dron pou 5G ak pi lwen, pp. 31–36. https://doi.org/10.1145/3414045.3415939.
Day, RA, Gastel, B., 1998. Ki jan yo ekri ak pibliye yon papye syantifik. Cambridge University Press. de Castro, AI, Pena, ˜ JM, Torres-Sanchez, ´ J., Jim´enez-Brenes, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ´ F., 2020. Maping cynodon dactylon infesting kouvri rekòt ak yon desizyon otomatik pye bwa-OBIA pwosedi ak simagri UAV pou viticulture presizyon. Deteksyon Remote 12 (1), 56. https://doi.org/10.3390/rs12010056.
de Castro, AI, Torres-S´ anchez, J., Pena, ˜ JM, Jim´enez-Brenes, FM, Csillik, O., Lopez-´Granados, F., 2018. Yon algorithm owaza forè-OBIA otomatik pou kat raje byen bonè ant ak nan ranje rekòt lè l sèvi avèk imaj UAV. Remote Sensing 10 (2). https://doi.org/10.3390/rs10020285.
Demir, N., Sonmez, ¨ NK, Akar, T., Ünal, S., 2018. Mezi otomatik nan wotè plant nan jenotip ble lè l sèvi avèk yon DSM ki sòti nan simagri UAV. Pwosedi 2 (7), 350. https://doi.org/10.3390/ecrs-2-05163.
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y., 2020. Lejè rezo segmentasyon semantik pou kat move zèb an tan reyèl lè l sèvi avèk machin ayeryen san ekipe. Appl. Sci. 10 (20), 7132. https://doi.org/10.3390/app10207132.
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018. UAV ki baze sou miltispectral remote sensing pou agrikilti presizyon: yon konparezon ant kamera diferan. ISPRS J. Photogramm. Remote Sens 146, 124–136.
Diaz-Gonzalez, FA, Vuelvas, J., Correa, CA, Vallejo, VE, Patino, D., 2022. Aprantisaj machin ak teknik teledeteksyon aplike pou estime endikatè tè - revizyon. Ekol. Ind. 135, 108517 https://doi.org/10.1016/j.ecolind.2021.108517.
Díaz-Varela, RA, De la Rosa, R., Leon, ´ L., Zarco-Tejada, PJ, 2015. Simagri UAV ayeryèn wo rezolisyon pou evalye paramèt kouwòn pye oliv yo lè l sèvi avèk foto 3D.
rekonstriksyon: aplikasyon nan esè elvaj. Teledeteksyon 7 (4), 4213–4232. https://doi.org/10.3390/rs70404213.
Dixit, A., Jakhar, SK, 2021. Jesyon kapasite ayewopò: yon revizyon ak analiz bibliyometrik. J. Air Transp. Jere. 91, 102010.
Dong, T., Shang, J., Liu, J., Qian, B., Jing, Q., Ma, B., Huffman, T., Geng, X., Sow, A., Shi, Y., Canisius, F., Jiao, X., Kovacs, JM, Walters, D., Cable, J., Wilson, J., 2019.
Sèvi ak simagri RapidEye pou idantifye varyasyon nan jaden kwasans ak sede nan Ontario, Kanada. Precision Agric. 20 (6), 1231–1250. https://doi.org/10.1007/
s11119-019-09646-w.
Dutta, PK, Mitra, S., 2021. Aplikasyon dron agrikòl ak iot pou konprann chèn ekipman pou manje pandan apre COVID-19. Nan: Choudhury, A., Biswas, A., Prateek, M.,
Chakrabarti, A. (Eds.), Enfòmatik agrikòl: Otomatik lè l sèvi avèk IoT ak aprantisaj machin. Wiley, paj 67–87. van Eck, N., Waltman, L., 2009. Sondaj lojisyèl: VOSviewer, yon pwogram òdinatè pou kat bibliyometrik. Syantometrik 84 (2), 523–538. https://doi.org/10.1007/s11192-009-0146-3.
Elijah, O., Rahman, TA, Orikumhi, I., Leow, CY, Hindia, MN, 2018. Yon BECA de Entènèt bagay (IoT) ak analiz done nan agrikilti: benefis ak defi.
IEEE Internet Things J. 5 (5), 3758–3773.
Enciso, J., Avila, CA, Jung, J., Elsayed-Farag, S., Chang, A., Yeom, J., Landivar, J., Maeda, M., Chavez, JC, 2019. Validasyon agronomi UAV ak jaden
mezi pou varyete tomat. Konpitè. Elektwon. Agrik. 158, 278–283. https:// doi.org/10.1016/j.compag.2019.02.011.
Espinoza, CZ, Khot, LR, Sankaran, S., Jacoby, PW, 2017. Gwo rezolisyon miltispectral ak tèmik teledeteksyon ki baze sou evalyasyon estrès dlo nan
pye rezen irigasyon anba tè. Teledeteksyon 9 (9), 961. https://doi.org/ 10.3390/rs9090961.
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020. Itilize hyperspectral remote sensing pou gradyasyon tè. Deteksyon Remote 12 (20), 3312. ttps://doi.org/10.3390/
rs12203312.
Fawcett, D., Panigada, C., Tagliabue, G., Boschetti, M., Celesti, M., Evdokimov, A., Biriukova, K., Colombo, R., Miglietta, F., Rascher, U., Anderson, K., 2020. Evalyasyon milti-echèl nan refleksyon sifas miltispektral ki baze sou abèy ak endis vejetasyon nan kondisyon operasyonèl yo. Teledeteksyon 12 (3), 514.
Feng, X., Yan, F., Liu, X., 2019. Etid nan teknoloji kominikasyon san fil sou entènèt nan bagay sa yo pou agrikilti presizyon. Wireless Pers. Komin. 108 (3),
1785-1802.
Ferreira, MP, Pinto, CF, Serra, FR, 2014. Teyori pri tranzaksyon yo nan rechèch biznis entènasyonal: yon etid bibliyometrik sou twa deseni. Syantometrik 98 (3), 1899–1922. https://doi.org/10.1007/s11192-013-1172-8.
Fisher, P., Abuzar, M., Rab, M., Pi bon, F., Chandra, S., 2009. Avansman nan agrikilti presizyon nan sidès Ostrali. I. yon metodoloji regression pou simulation
varyasyon espasyal nan pwodiksyon sereyal lè l sèvi avèk pwodiksyon istorik paddock kiltivatè yo ak nòmalize endèks vejetasyon diferans. Rekòt patiraj Sci. 60 (9), 844–858.
Floreano, D., Wood, RJ, 2015. Syans, teknoloji ak avni ti dron otonòm. Nature 521 (7553), 460–466. https://doi.org/10.1038/nature14542.
Friha, O., Ferrag, MA, Shu, L., Maglaras, LA, Wang, X., 2021. Entènèt bagay pou lavni nan agrikilti entelijan: yon sondaj konplè sou teknoloji émergentes. IEEE CAA J. Autom. Sinica 8 (4), 718–752.
Fuentes-Pacheco, J., Torres-Olivares, J., Roman-Rangel, E., Cervantes, S., JuarezLopez, P., Hermosillo-Valadez, J., Rendon-Mancha, ´ JM, 2019. Fig plant segmentation soti nan imaj ayeryen lè l sèvi avèk yon rezo encoder-decoder gwo twou san fon konvolusyon. Teledeteksyon 11 (10), 1157. https://doi.org/10.3390/rs11101157.
Gago, J., Douthe, C., Coopman, RE, Gallego, PP, Ribas-Carbo, M., Flexas, J., Escalona, J., Medrano, H., 2015. UAVs defi pou evalye estrès dlo pou
agrikilti dirab. Agrik. Jere dlo. 153, 9–19. https://doi.org/10.1016/j. agwat.2015.01.020.
García-Tejero, IF, Rubio, AE, Vinuela, ˜ I., Hern´ andez, A., Guti´errez-Gordillo, S., Rodríguez-Plegezuelo, CR, Dur´an-Zuazo, VH, 2018. Tèmik D. nan plant la
nivo pou evalye estati rekòt-dlo nan pye zanmann (cv. Guara) anba estrateji irigasyon defisi. Agrik. Jere dlo. 208, 176–186. https://doi.org/10.1016/j.
agwat.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. Sifas refleksyon ak suninduced fluoresans spectroskopi mezi lè l sèvi avèk yon ti UAS hyperspectral. Teledeteksyon 9 (5), 472. https://doi.org/10.3390/rs9050472. Gaˇsparovi´c, M., Zrinjski, M., Barkovi´c, Đ., Radoˇcaj, D., 2020. Yon metòd otomatik pou
kat raje nan jaden avwàn ki baze sou simagri UAV. Konpitè. Elektwon. Agrik.
Gebbers, R., Adamchuk, VI, 2010. Agrikilti presizyon ak sekirite alimantè. Syans 327 (5967), 828–831. https://doi.org/10.1126/science.1183899.
Geipel, J., Link, J., Claupein, W., 2014. Konbine modèl espèk ak espasyal nan pwodiksyon mayi ki baze sou imaj ayeryen ak modèl sifas rekòt akeri ak yon sistèm avyon san ekipe. Remote Sensing 6 (11), 10335–10355. https://doi.org/10.3390/rs61110335.
Geng, D., Feng, Y., Zhu, Q., 2020. Konsepsyon dirab pou itilizatè yo: yon revizyon literati ak analiz bibliyometrik. Anviwònman. Sci. Polisyon. Res. 27 (24), 29824–29836. https://doi. org/10.1007/s11356-020-09283-1.
Gevaert, CM, Suomalainen, J., Tang, J., Kooistra, L., 2015. Jenerasyon sifas repons spectraltemporal lè w konbine satelit miltispektral ak ipèspèktral.
Imaj UAV pou aplikasyon pou agrikilti presizyon. IEEE J. Sel. Top. Appl. Latè Obs. Remote Senses 8 (6), 3140–3146. ttps://doi.org/10.1109/JSTARS.2015.2406339.
Gill, SS, Chana, I., Buyya, R., 2017. IoT ki baze sou agrikilti kòm yon nwaj ak gwo sèvis done: kòmansman dijital peyi Zend. J. Org. ak End User Comput. (JOEUC) 29 (4),
1-23.
Gmür, M., 2006. Ko-sitasyon analiz ak rechèch la pou kolèj envizib: yon evalyasyon metodolojik. Syantometrik 57 (1), 27–57. https://doi.org/10.1023/
a:1023619503005.
Gnadinger, ¨ F., Schmidhalter, U., 2017. Konte dijital plant mayi pa Veyikil Ayeryen Unmanned (UAV). Remote Sensing 9 (6). Https://doi.org/10.3390/rs9060544.
Gokto ¨ ǧan, AH, Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010. Yon machin ayeryen san ekip Rotary-zèl pou siveyans raje akwatik ak
jesyon. J. Entèl. Robotics Syst.: Theor. Appl. 57 (1–4), 467–484. https://doi. org/10.1007/s10846-009-9371-5.
Gomez-Cand ´ on, ´ D., De Castro, AI, Lopez-Granados, ´ F., 2014. Evalye presizyon nan mozayik nan simagri veyikil ayeryen san ekipe (UAV) pou rezon agrikilti presizyon nan ble. Precis. Agrik. 15 (1), 44–56. https://doi.org/10.1007/s11119-013-9335-4.
Gomez-Cand ´ on, ´ D., Virlet, N., Labb´e, S., Jolivot, A., Regnard, J.-L., 2016. Fenotip jaden estrès dlo nan echèl pyebwa pa simagri UAV-sensed : nouvo Sur pou
akizisyon tèmik ak kalibrasyon. Precis. Agrik. 17 (6), 786–800. https://doi.org/10.1007/s11119-016-9449-6.
Gonzalez-Dugo, V., Zarco-Tejada, PJ, Fereres, E., 2014. Aplikasyon ak limit lè l sèvi avèk endèks estrès dlo rekòt la kòm yon endikatè defisi dlo nan jaden Citrus. Agrik. Pou. Meteorol. 198–199, 94–104. https://doi.org/10.1016/j. agrformet.2014.08.003.
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ´ E., Nortes, PA, Alarcon, ´ JJ, Intrigliolo, DS, Fereres, E., 2013. Sèvi ak simagri tèmik UAV rezolisyon wo pou
evalye varyasyon nan eta dlo senk espès pyebwa ki donnen nan yon orchard komèsyal. Precis. Agrik. 14 (6), 660–678. https://doi.org/10.1007/s11119-013-9322-9.
Goyal, K., Kumar, S., 2021. Alfabetizasyon finansye: Yon revizyon sistematik ak analiz bibliyometrik. Ent. J. Etid Konsomatè 45 (1), 80–105. https://doi.org/10.1111/
ijcs.12605.
Grenzdorffer, ¨ GJ, Engel, A., Teichert, B., 2008. Potansyèl fotogrametrik uavs lowcost nan forè ak agrikilti. Achiv Entènasyonal Fotogrametri, Teledeteksyon ak Syans Enfòmasyon Espasyal – Achiv ISPRS 37, 1207–1213. https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e.
Guan, S., Fukami, K., Matsunaka, H., Okami, M., Tanaka, R., Nakano, H., Sakai, T., Nakano, K., Ohdan, H., Takahashi, K., 2019. Evalye korelasyon wo-rezolisyon
NDVI ak nivo aplikasyon angrè ak sede nan rekòt diri ak ble lè l sèvi avèk ti UAV. Teledeteksyon 11 (2), 112.
Gundolf, K., Filser, M., 2013. Jesyon rechèch ak relijyon: yon analiz sitasyon. J. Otobis. Etik 112 (1), 177–185.
Guo, Q., Zhu, Y., Tang, Y., Hou, C., He, Y., Zhuang, J., Zheng, Y., Luo, S., 2020. CFD simulation ak verifikasyon eksperimantal nan espasyal la ak distribisyon tanporèl nan
koule lè a downwash nan yon dron agrikòl kwadwilatè-rotor nan hover. Konpitè. Elektwon. Agrik. 172, 105343 https://doi.org/10.1016/j.compag.2020.105343.
Haghighattalab, A., Gonz´ alez P´erez, L., Mondal, S., Singh, D., Schinstock, D., Rutkoski, J., Ortiz-Monasterio, I., Singh, RP, Goodin, D. , Polòy, J., 2016.
Aplikasyon nan sistèm ayeryen san ekipe pou gwo debi fenotip nan gwo pepinyè elvaj ble. Plant Metòd 12 (1). https://doi.org/10.1186/s13007-
016-0134-6.
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013. Spectral D 'nan UAVs anba diferan kondisyon lumières . Nan GG Bill R. (Ed.), Achiv Entènasyonal Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives (Vol. 40, Nimewo 1W2, pp. 189–194). Sosyete Entènasyonal pou Fotogrametri ak Teledeteksyon. https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632.
Hamylton, SM, Morris, RH, Carvalho, RC, Roder, N., Barlow, P., Mills, K., Wang, L.Evalyasyon teknik pou fè kat vejetasyon zile nan ayeryen san ekipe.
imaj machin (UAV): klasifikasyon piksèl, entèpretasyon vizyèl ak apwòch aprantisaj machin. Ent. J. Appl. Latè Obs. Geoinf. 89, 102085 https://doi.org/
10.1016/j.jag.2020.102085.
Haque, A., Islam, N., Samrat, NH, Dey, S., Ray, B., 2021. Agrikilti entelijan atravè lidèchip responsab nan Bangladèch: posiblite, opòtinite, ak pi lwen.
Dirab 13 (8), 4511.
Hardin, PJ, Hardin, TJ, 2010. Ti-echèl machin ki te kontwole adistans nan rechèch anviwònman an. Jewografi Bousòl 4 (9), 1297–1311. ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x.
Hardin, PJ, Jensen, RR, 2011. Ti-echèl machin ayeryen san ekipe nan anviwònman teledeteksyon: defi ak opòtinite. GISci. Remote Senses 48 (1), 99–111. https://doi.org/10.2747/1548-1603.48.1.99.
Li, Y., Nie, P., Zhang, Q., Liu, F., 2021. Agrikòl Entènèt bagay: teknoloji ak aplikasyon, (1ye ed. 2021 edisyon). Springer.
Herwitz, SR, Johnson, LF, Dunagan, SE, Higgins, RG, Sullivan, DV, Zheng, J., Lobitz, BM, Leung, JG, Gallmeyer, BA, Aoyagi, M., Slye, RE, Brass, JA, 2004.
Imaging soti nan yon veyikil ayeryen san ekipe: siveyans agrikòl ak sipò pou desizyon. Konpitè. Elektwon. Agrik. 44 (1), 49–61. https://doi.org/10.1016/j.
konpag.2004.02.006.
Holman, FH, Riche, AB, Michalski, A., Castle, M., Wooster, MJ, Hawkesford, MJ, Fenotip segondè jaden debi wotè plant ble ak to kwasans nan esè trase jaden lè l sèvi avèk UAV ki baze sou deteksyon remote. Remote Sensing 8 (12). https://doi. org/10.3390/rs8121031.
Honkavaara, E., Saari, H., Kaivosoja, J., Pol ¨ onen, ¨ I., Hakala, T., Litkey, P., M¨akynen, J., Pesonen, L., 2013. Processing and assessment nan espektwometrik, simagri stereoskopik kolekte lè l sèvi avèk yon kamera espèk UAV ki lejè pou agrikilti presizyon. Remote Sensing 5 (10), 5006–5039. https://doi.org/10.3390/rs5105006.
Hossein Motlagh, N., Taleb, T., Arouk, O., 2016. Ba-altitid san ekipe machin ayeryen ki baze sou sèvis entènèt bagay: sondaj konplè ak pèspektiv nan lavni. IEEE Internet Things J. 3 (6), 899–922. https://doi.org/10.1109/JIOT.2016.2612119.
Hrabar, S., Sukhatme, GS, Corke, P., Usher, K., Roberts, J., 2005. Konbine optik-koule ak navigasyon ki baze sou stereo nan kanyon iben pou yon UAV. Nan: 2005 IEEE/RSJ
Konferans entènasyonal sou robo entèlijan ak sistèm, pp 3309–3316. https://doi.org/10.1109/IROS.2005.1544998.
Hsu, T.-C., Yang, H., Chung, Y.-C., Hsu, C.-H., 2020. Yon platfòm agrikilti kreyatif IoT pou nwaj bwouya informatique. Soutni. Konpitè. Enf. Syst. 28, 100285.
Huang, H., Deng, J., Lan, Y., Yang, A., Deng, X., Zhang, L., Gonzalez-Andujar, JL, 2018. Yon rezo konplètman konvolusyonèl pou kat move zèb nan veyikil ayeryen san ekipe ( UAV) imaj. PLoS YON 13 (4), e0196302.
Huang, H., Lan, Y., Yang, A., Zhang, Y., Wen, S., Deng, J., 2020. Aprantisaj pwofon kont analiz imaj ki baze sou objè (OBIA) nan kat raje nan simagri UAV. Ent. J.
Remote Sens 41 (9), 3446–3479. https://doi.org/10.1080/01431161.2019.1706112.
Huang, H., Yang, A., Tang, Y., Zhuang, J., Hou, C., Tan, Z., Dananjayan, S., Li, Y., Guo, Q., Luo, S., 2021. Kalibrasyon koulè gwo twou san fon pou simagri UAV nan siveyans rekòt
lè l sèvi avèk transfè style semantik ak atansyon lokal nan global. Ent. J. Appl. Latè Obs. Geoinf. 104, 102590 https://doi.org/10.1016/j.jag.2021.102590.
Huang, YB, Thomson, SJ, Hoffmann, WC, Lan, YB, Fritz, BK, 2013. Devlopman ak pwospè teknoloji machin ayeryen san ekipe pou pwodiksyon agrikòl
jesyon. Ent. J. Agric. Biol. Eng. 6 (3), 1–10. https://doi.org/10.3965/j. ijabe.20130603.001.
Huang, Y., Hoffmann, WC, Lan, Y., Wu, W., Fritz, BK, 2009. Devlopman yon sistèm espre pou yon platfòm machin ayeryen san ekipe. Appl. Eng. Agrik. 25 (6), 803–809.
Hunt Jr., ER, Dean Hively, W., Fujikawa, SJ, Linden, DS, Daughtry, CST, McCarty, GW, 2010. Akizisyon foto dijital NIR-vèt-ble soti nan
avyon san ekipe pou siveyans rekòt. Deteksyon Remote 2 (1), 290–305. https://doi. org/10.3390/rs2010290. Inoue, Y., 2020. Deteksyon remote ki baze sou satelit ak abèy nan rekòt ak tè pou agrikilti entelijan–yon revizyon. Tè Sci. Plant Nutr. 66 (6), 798–810. https://doi.org/10.1080/00380768.2020.1738899.
Islam, N., Rashid, MM, Pasandideh, F., Ray, B., Moore, S., Kadel, R., 2021. Yon revizyon aplikasyon ak teknoloji kominikasyon pou Entènèt bagay (IoT) ak
Veyikil ayeryen san ekipe (UAV) ki baze sou agrikilti entelijan dirab. Dirab 13 (4), 1821. https://doi.org/10.3390/su13041821.
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016. Evalye presizyon nan gwo rezolisyon modèl sifas dijital kalkile pa
PhotoScan® ak MicMac® nan kondisyon sondaj ki pa pi bon yo. Remote Sensing 8 (6), https://doi.org/10.3390/rs8060465.
Jim´enez-Brenes, FM, Lopez-Granados, ´ F., Castro, AI, Torres-S´ anchez, J., Serrano, N., Pena, ˜ JM, 2017. Kantifye enpak koupe sou achitekti pye oliv ak chak ane kwasans canopy lè l sèvi avèk modèl 3D ki baze sou UAV. Plant Metòd 13 (1). https://doi.org/10.1186/s13007-017-0205-3.
Jin, X., Liu, S., Baret, F., Hemerl´e, M., Comar, A., 2017. Estimasyon dansite plant nan rekòt ble nan aparisyon nan simagri UAV altitid trè ba. Remote Sens.
Anviwònman. 198, 105–114. https://doi.org/10.1016/j.rse.2017.06.007.
Jinbo, C., Xiangliang, C., Han-Chi, F., Lam, A., 2019. Sistèm siveyans pwodwi agrikòl sipòte pa cloud computing. Cluster Comput. 22 (4), 8929–8938.
Ju, C., & Pitit gason, HI 2018a. Evalyasyon pèfòmans plizyè sistèm UAV pou teledeteksyon nan agrikilti. Pwosedi Atelye sou Robotics Vizyon ak Aksyon nan Agrikilti nan Konferans Entènasyonal IEEE sou Robotics ak Otomatik (ICRA), Brisbane, Ostrali, 21–26.
Ju, C., Pitit gason, HI, 2018b. Plizyè sistèm UAV pou aplikasyon pou agrikòl: kontwòl, aplikasyon, ak evalyasyon. Elektwonik 7 (9), 162. https://doi.org/10.3390/
elektwonik7090162.
Jung, J., Maeda, M., Chang, A., Bhandari, M., Ashapure, A., Landivar-Bowles, J., 2021. Potansyèl deteksyon aleka ak entèlijans atifisyèl kòm zouti pou amelyore
rezistans nan sistèm pwodiksyon agrikòl. Curr. Opinyon. Biotechnol. 70, 15–22. https://doi.org/10.1016/j.copbio.2020.09.003.
Kalischuk, M., Paret, ML, Freeman, JH, Raj, D., Da Silva, S., Eubanks, S., Wiggins, DJ, Lollar, M., Marois, JJ, Mellinger, HC, Das, J. , 2019. Yon teknik scouting amelyore nan rekòt ki enkòpore imaj rekòt miltispektral ak veyikil ayeryen san ekipe nan pratik scouting konvansyonèl pou cheche tij gluan nan melon. Plant Dis. 103 (7), 1642–1650.
Kapoor, KK, Tamilmani, K., Rana, NP, Patil, P., Dwivedi, YK, Nerur, S., 2018. Avans nan rechèch medya sosyal: sot pase, prezan ak lavni. Enfòme. Syst. Devan. 20
(3), 531-558.
Kerkech, M., Hafiane, A., Canals, R., 2020. VddNet: rezo deteksyon maladi pye rezen ki baze sou imaj miltispektral ak kat pwofondè. Remote Sensing 12 (20), 3305. https://doi. org/10.3390/rs12203305.
Khaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019. Konparezon simagri miltispektral satelit ak UAV ki baze sou pou jaden rezen
evalyasyon varyasyon. Deteksyon Remote 11 (4). https://doi.org/10.3390/rs11040436.
Khan, PW, Byun, Y.-C., Park, N., 2020. IoT-blockchain pèmèt sistèm pwovens optimize pou endistri manje 4.0 lè l sèvi avèk aprantisaj pwofon avanse. Detèktè 20 (10), 2990.
Khan, RU, Khan, K., Albattah, W., Qamar, AM, Ullah, F., 2021. Deteksyon imaj ki baze sou maladi plant: soti nan aprantisaj machin klasik nan vwayaj aprantisaj pwofon. Wireless Commun. Konpitè mobil. 2021, 1–13.
Khan, S., Tufail, M., Khan, MT, Khan, ZA, Iqbal, J., Alam, M., Le, KNQ, 2021. Yon roman kad semi-sipèvize pou klasifikasyon rekòt / raje UAV ki baze sou. PLoS YON 16 (5), e0251008.
Khanal, S., Fulton, J., Shearer, S., 2017. Yon BECA de aplikasyon aktyèl ak potansyèl nan tèmik deteksyon remote nan agrikilti presizyon. Konpitè. Elektwon.
Agrik. 139, 22–32. https://doi.org/10.1016/j.compag.2017.05.001.
Khanna, A., Kaur, S., 2019. Evolisyon Entènèt bagay (IoT) ak enpak enpòtan li nan jaden Precision Agriculture. Konpitè. Elektwon. Agrik. 157, 218–231.
Kim, W., Khan, GF, Wood, J., Mahmood, MT, 2016. Angajman anplwaye pou òganizasyon dirab: analiz mo kle lè l sèvi avèk analiz rezo sosyal ak pete.
apwòch deteksyon. Dirab 8 (7), 631.
Kirsch, M., Lorenz, S., Zimmermann, R., Tusa, L., Mockel, ¨ R., Hodl, ¨ P., Booysen, R., Khodadadzadeh, M., Gloaguen, R., 2018. Entegrasyon nan tèrès ak abèy-fè
metòd deteksyon ipèspektral ak fotogrametrik pou kat eksplorasyon ak siveyans min. Teledeteksyon 10 (9), 1366. https://doi.org/10.3390/
rs10091366.
Kitano, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019. Konte plant mayi lè l sèvi avèk aprantisaj pwofon ak imaj UAV. IEEE Geosci. Remote Sens Lett. 1–5 https://doi.org/10.1109/LGRS.2019.2930549.
Koh, JCO, Spangenberg, G., Kant, S., 2021. Aprantisaj machin otomatik pou fenotip plant ki baze sou imaj ki wo. Teledeteksyon 13 (5), 858. https://
doi.org/10.3390/rs13050858.
Kovalev, IV, Voroshilova, AA, 2020. Tandans modèn teknolojik nan devlopman nan ekosistèm nan kago UAVs. J. Fizik. Konf. Ser. 1515 (5), 052068 https://doi. org/10.1088/1742-6596/1515/5/052068.
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021. Vizyèl SLAM pou bèt andedan kay la ak agrikilti lè l sèvi avèk yon ti abèy ak yon kamera monokulèr: yon etid posibilite.
Drones 5 (2), 41. https://doi.org/10.3390/drones5020041.
Kulbacki, M., Segen, J., Knie´c, W., Klempous, R., Kluwak, K., Nikodem, J., Kulbacka, J., Serester, A., 2018. Sondaj sou dron pou automatisation agrikilti soti nan plante a
rekòt. Nan: INES 2018 – IEEE 22nd Konferans Entènasyonal sou Sistèm Jeni Entelijan, pp 000353–358. https://doi.org/10.1109/INES.2018.8523943.
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018. UAV IoT kad opinyon ak defi: nan direksyon pou pwoteje dron kòm "Bagay". Detèktè 18 (11), 4015. https://doi.org/10.3390/s18114015.
Laliberte, AS, Rango, A., 2011. Pwosesis pwosesis imaj ak klasifikasyon pou analiz imaj sub-desimèt akeri ak yon avyon san ekipe sou arid.
pyèj. GISci. Remote Senses 48 (1), 4–23. https://doi.org/10.2747/1548-1603.48.1.4.
Laliberte, AS, Rango, A., Herrick, JE, 2007. Veyikil ayeryen san ekipe pou kat ranje ak siveyans: yon konparezon de sistèm. Pwosedi Konferans Anyèl ASPRS.
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021. Yon workflow sous louvri pou kat raje nan preri natif natal.
itilize machin ayeryen san ekipe: Sèvi ak Rumex obtusifolius kòm yon etid ka. Lajan ewo. J.Remote Sens 54 (sup1), 71–88. https://doi.org/10.1080/22797254.2020.1793687.
Lambert, DM, Lowenberg-DeBoer, J., Griffin, TW, Peone, J., Payne, T., Daberkow, SG, 2004. Adopsyon, rentabilité, ak pi bon itilizasyon done agrikilti presizyon.
Papye travay. Inivèsite Purdue. https://doi.org/10.22004/ag.econ.28615.
Lelong, CCD, Burger, P., Jubelin, G., Roux, B., Labb´e, S., Baret, F., 2008. Evalyasyon simagri veyikil ayeryen san ekipe pou siveyans quantitative rekòt ble nan ti simityè yo. Detèktè 8 (5), 3557–3585. https://doi.org/10.3390/s8053557.
Li, C., Niu, B., 2020. Konsepsyon agrikilti entelijan ki baze sou done gwo ak Entènèt bagay sa yo. Ent. J. Distrib. Sens Netw. 16 (5) ttps://doi.org/10.1177/1550147720917065.
Li, W., Niu, Z., Chen, H., Li, D., Wu, M., Zhao, W., 2016. Estimasyon elwaye nan wotè canopy ak byomass anlè tè mayi lè l sèvi avèk imaj stereo rezolisyon segondè ki soti nan yon sistèm machin ayeryen san ekipe a pri ki ba. Ekol. End. 67, 637–648. https://doi.org/10.1016/j.ecolind.2016.03.036.
Liakos, KG, Busato, P., Moshou, D., Pearson, S., Bochtis, D., 2018. Aprantisaj machin nan agrikilti: yon revizyon. Detèktè 18 (8), 2674.
Liebisch, F., Kirchgessner, N., Schneider, D., Walter, A., Hund, A., 2015. Remote, fenotip ayeryen nan karakteristik mayi ak yon apwòch mobil milti-detèktè. Plant Methods 11 (1), 9. https://doi.org/10.1186/s13007-015-0048-8.
Lin, Z., Guo, W., 2020. Deteksyon panikul sorgo ak konte lè l sèvi avèk imaj sistèm ayeryen san ekipe ak aprantisaj pwofon. Devan. Plant Sci. 11.
Liu, S., Guo, L., Webb, H., Ya, X., Chang, X., 2019. Sistèm siveyans Entènèt bagay nan modèn ekolojik-agrikilti ki baze sou nwaj informatique. Aksè IEEE 7, 37050–37058.
Lopez-Granados, ´ F., 2011. Deteksyon raje pou jesyon raje espesifik nan sit: kat ak apwòch an tan reyèl. Raje Res. 51 (1), 1–11. https://doi.org/10.1111/j.1365-3180.2010.00829.x.
Lopez-Granados, ´ F., Torres-Sanchez, ´ J., De Castro, A.-I., Serrano-P´erez, A., MesasCarrascosa, F.-J., Pena, ˜ J.-M. , 2016. Siveyans bonè ki baze sou objè nan yon raje zèb nan yon rekòt zèb lè l sèvi avèk simagri UAV rezolisyon segondè. Agron. Soutni. Dev. 36 (4), 1–12
Lopez-Granados, ´ F., Torres-S´ anchez, J., Serrano-P´erez, A., de Castro, AI, MesasCarrascosa, F.-J., Pena, ˜ J.-M., 2016. Kat raje nan kòmansman sezon tounsòl lè l sèvi avèk teknoloji UAV: varyasyon kat tretman èbisid kont papòt raje. Precis. Agrik. 17 (2), 183–199.
Lucieer, A., Malenovský, Z., Veness, T., Wallace, L., 2014. HyperUAS - spèktroskopi D 'nan yon sistèm avyon san ekipe multirotor. J. Field Rob. 31 (4),
571–590. https://doi.org/10.1002/rob.21508.
Lumme, J., Karjalainen, M., Kaartinen, H., Kukko, A., Hyyppa, ¨ J., Hyypp¨ a, H., Jaakkola, A., & Kleemola, J., 2008. Terès lazè optik nan rekòt agrikòl. Nan JJ
Chen J. Maas H–G. (Ed.), Achiv Entènasyonal Fotogrametri, Teledeteksyon ak Syans Enfòmasyon Espasyal — Achiv ISPRS (Vol. 37, pp. 563–566).
Sosyete Entènasyonal pou Fotogrametri ak Teledeteksyon. https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574
b802131a99d16318ce619a01ca1bf.
Ma, L., Li, M., Ma, X., Cheng, L., Du, P., Liu, Y., 2017. Yon revizyon klasifikasyon imaj sipèvize ki baze sou objè kouvri. ISPRS J. Photogramm. Remote Senses 130,
277–293. https://doi.org/10.1016/j.isprsjprs.2017.06.001.
Maes, WH, Steppe, K., 2019. Pèspektiv pou teledeteksyon ak machin ayeryen san ekipe nan agrikilti presizyon. Tandans Plant Sci. 24 (2), 152–164. https://doi.org/10.1016/j.tplants.2018.11.007.
Maimaitijiang, M., Ghulam, A., Sidike, P., Hartling, S., Maimaitiyiming, M., Peterson, K., Shavers, E., Fishman, J., Peterson, J., Kadam, S., Burken, J., Fritschi, F., 2017.
Sistèm ayeryen san ekipe (UAS) ki baze sou fenotip soya lè l sèvi avèk fizyon done milti-detèktè ak machin aprantisaj ekstrèm. ISPRS J. Photogramm. Remote Sens 134, 43–58. https://doi.org/10.1016/j.isprsjprs.2017.10.011. Maimaitijiang, M., Sagan, V., Sidike, P., Daloye, AM, Erkbol, H., Fritschi, FB, 2020.
Siveyans rekòt lè l sèvi avèk fizyon done satelit/UAV ak aprantisaj machin. Teledeteksyon 12 (9), 1357. https://doi.org/10.3390/rs12091357.
Manfreda, S., McCabe, M., Miller, P., Lucas, R., Pajuelo Madrigal, V., Mallinis, G., Ben Dor, E., Helman, D., Estes, L., Ciraolo, G. ., Müllerova, ´ J., Tauro, F., de Lima, M., de
Lima, J., Maltese, A., Frances, F., Caylor, K., Kohv, M., Perks, M., Ruiz-P´erez, G., Su, Z., Vico, G., Toth , B., 2018. Sou itilizasyon sistèm ayeryen san ekipe pou
siveyans anviwònman an. Deteksyon Remote 10 (4), 641.
Marinko, RA, 1998. Sitasyon nan jounal etid fanm nan tèz, 1989 ak The Serials Librarian 35 (1–2), 29–44. https://doi.org/10.1300/J123v35n01_
03.
Masroor, R., Naeem, M., Ejaz, W., 2021. Jesyon resous nan rezo san fil ki ede UAV: yon pèspektiv optimize. Ad Hoc Netw. 121, 102596 https://doi.org/10.1016/j.adhoc.2021.102596.
Matese, A., Di Gennaro, SF, 2018. Aplikasyon pratik nan yon platfòm UAV multisensor ki baze sou imaj miltispektral, tèmik ak RGB rezolisyon segondè nan presizyon
vitikultur. Agrikilti 8 (7), 116. https://doi.org/10.3390/agriculture8070116.
Matese, A., Di Gennaro, SF, 2021. Pi lwen pase endèks NDVI tradisyonèl la kòm yon faktè kle pou endikap itilize UAV nan vitikultur presizyon. Sci. Rep. 11 (1), 2721. https://doi.org/10.1038/s41598-021-81652-3.
Matese, A., Toscano, P., Di Gennaro, SF, Genesio, L., Vaccari, FP, Primicerio, J., Belli, C., Zaldei, A., Bianconi, R., Gioli, B., 2015 . Konparezon UAV, avyon
ak satelit platfòm teledeteksyon pou vitikultur presizyon. Teledeteksyon 7 (3), 2971–2990. https://doi.org/10.3390/rs70302971.
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020. UAV ak machin aprantisaj ki baze sou rafineman nan yon endèks vejetasyon satelit-kondwi pou presizyon.
agrikilti. Detèktè 20 (9), 2530. https://doi.org/10.3390/s20092530.
McCain, KW, 1990. Kat otè nan espas entelektyèl: yon apèsi teknik. J. Am. Soc. Info. Sci. 41 (6), 433–443.
Meinen, BU, Robinson, DT, 2021. Modèl ewozyon agrikòl: evalye estimasyon ewozyon USLE ak WEPP nan echèl jaden lè l sèvi avèk done seri tan UAV. Anviwònman. Modell. Lojisyèl 137, 104962. https://doi.org/10.1016/j.envsoft.2021.104962.
Melville, B., Lucieer, A., Aryal, J., 2019. Klasifikasyon nan kominote savann natif natal ki itilize ipèspektral Sistèm Avyon Unmanned (UAS) Imajri nan
Midlands Tasmanyen. Drones 3 (1), 5.
Messina, G., Modica, G., 2020. Aplikasyon nan simagri tèmik UAV nan agrikilti presizyon: eta nan atizay la ak pespektiv rechèch nan lavni. Remote Sensing 12 (9), https://doi.org/10.3390/rs12091491.
Mishra, D., Luo, Z., Jiang, S., Papadopoulos, T., Dubey, R., 2017. Yon etid bibliyografik sou done gwo: konsèp, tandans ak defi. Jere Pwosesis Biznis. J. 23 (3),
555-573.
Mochida, K., Saisho, D., Hirayama, T., 2015. Amelyorasyon rekòt lè l sèvi avèk seri done sik lavi akeri anba kondisyon jaden. Devan. Plant Sci. 6 https://doi.org/10.3389/
fpls.2015.00740.
Mogili, UM.R., Deepak, BBVL, 2018. Revizyon sou aplikasyon sistèm abèy nan agrikilti presizyon. Procedia Comput. Sci. 133, 502–509.
Moharana, S., Dutta, S., 2016. Varyasyon espasyal nan klowofil ak kontni nitwojèn nan diri ki soti nan simagri ipèspèktral. ISPRS J. Photogramm. Remote Senses 122, 17–29.
Muangprathub, J., Boonnam, N., Kajornkasirat, S., Lekbangpong, N., Wanichsombat, A.,
Nillaor, P., 2019. Analiz done IoT ak agrikilti pou fèm entelijan. Konpitè. Elektwon. Agrik. 156, 467–474.
Nansen, C., Elliott, N., 2016. Remote deteksyon ak pwofil refleksyon nan entomoloji. Ann. Rev Entomol. 61 (1), 139–158. https://doi.org/10.1146/annurev-ento010715-023834.
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016. Multispectral kat nan agrikilti: mozayik tèren lè l sèvi avèk yon otonòm quadcopter UAV. Ent. Konf.
Sistèm avyon san ekipe. (ICUAS) 2016, 1351–1358. https://doi.org/10.1109/ ICUAS.2016.7502606.
Nayyar, A., Nguyen, B.-L., Nguyen, NG, 2020. Entènèt la nan bagay abèy (Iodt): vizyon nan lavni nan dron entelijan. Adv. Entèl. Syst. Konpitè. 1045, 563–580. https://doi.org/10.1007/978-981-15-0029-9_45.
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. Yon Capteur miltispektral ki lejè pou mikwo UAV-opòtinite pou rezolisyon trè wo teledeteksyon ayeryèn. Ent. Arch. Fotogram. Remote Sens. Enf. Sci 37 (B1), 1193–1200.
Negash, L., Kim, H.-Y., Choi, H.-L., 2019. Emerging UAV aplikasyon nan agrikilti. Nan: 2019 7yèm Konferans Entènasyonal sou Teknoloji entèlijans robo ak
Aplikasyon (RiTA), paj 254–257. https://doi.org/10.1109/RITAPP.2019.8932853.
Nerur, SP, Rasheed, AA, Natarajan, V., 2008. Estrikti entelektyèl jaden jesyon estratejik la: yon analiz ko-sitasyon otè. Strateg. Jere. J. 29 (3),
319-336.
Neupane, K., Baysal-Gurel, F., 2021. Idantifikasyon otomatik ak siveyans maladi plant lè l sèvi avèk machin ayeryen san ekipe: yon revizyon. Teledeteksyon 13 (19), 3841. https://doi.org/10.3390/rs13193841.
Nex, F., Remondino, F., 2014. UAV pou aplikasyon pou kat 3D: yon revizyon. Appl. Jeomatik 6 (1), 1–15. https://doi.org/10.1007/s12518-013-0120-x.
Niu, H., Hollenbeck, D., Zhao, T., Wang, D., Chen, Y., 2020. Evapotranspirasyon estimasyon ak ti UAV nan agrikilti presizyon. Detèktè 20 (22), 6427. https://
doi.org/10.3390/s20226427.
Osareh, F., 1996. Bibliometrik, analiz sitasyon ak analiz ko-sitasyon. A Review of Literature I 46 (3), 149–158. https://doi.org/10.1515/libr.1996.46.3.149.
P´adua, L., Vanko, J., Hruˇska, J., Ad˜ ao, T., Sousa, JJ, Peres, E., Morais, R., 2017. UAS, detèktè, ak pwosesis done nan agroforestry: yon revizyon anvè aplikasyon pratik. Ent. J. Remote Sens 38 (8–10), 2349–2391. https://doi.org/10.1080/01431161.2017.1297548.
Panday, US, Pratihast, AK, Aryal, J., Kayastha, RB, 2020. Yon revizyon sou solisyon done ki baze sou abèy pou rekòt sereyal. Drones 4 (3), 1–29. https://doi.org/10.3390/
dron4030041.
Parsaeian, M., Shahabi, M., Hassanpour, H., 2020. Estimasyon lwil oliv ak pwoteyin kontni nan grenn wowoli lè l sèvi avèk pwosesis imaj ak rezo neral atifisyèl. J. Am. Lwil oliv
Chemists' Soc. 97 (7), 691–702.
Pena, ˜ JM, Torres-S´anchez, J., de Castro, AI, Kelly, M., Lopez-Granados, ´ F., Suarez, O., Kat raje nan jaden mayi nan kòmansman sezon lè l sèvi avèk analiz ki baze sou objè nan
Imaj machin ayeryen san ekipe (UAV). PLoS ONE 8 (10), e77151.
P´erez-Ortiz, M., Pena, ˜ JM, Guti´errez, PA, Torres-S´ anchez, J., Herv´ as-Martínez, C.,
Lopez-Granados, ´ F., 2015. Yon sistèm semi-sipèvize pou kat raje nan rekòt tounsòl lè l sèvi avèk veyikil ayeryen san ekipe ak yon metòd deteksyon ranje rekòt. Appl. Konpitè mou. J. 37, 533–544. https://doi.org/10.1016/j.asoc.2015.08.027.
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, SS, 2021. Aparèy IoT ki koute chè kòm sous done ki fè konfyans pou yon sistèm jesyon dlo ki baze sou blòk nan agrikilti presizyon. Konpitè. Elektwon. Agrik. 180, 105889.
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020. Avanse sistèm UAV-WSN pou siveyans entèlijan nan agrikilti presizyon. Detèktè 20 (3), https://doi.org/10.3390/s20030817.
Pournader, M., Shi, Y., Seuring, S., Koh, SL, 2020. Blockchain aplikasyon nan chèn ekipman pou, transpò ak lojistik: yon revizyon sistematik nan literati a. Ent. J. Prod. Res. 58 (7), 2063–2081.
Primicerio, J., Di Gennaro, SF, Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vaccari, FP, 2012. Yon veyikil ayeryen fleksib san ekipe pou agrikilti presizyon.
Precis. Agrik. 13 (4), 517–523. https://doi.org/10.1007/s11119-012-9257-6.
Pritchard, A., 1969. Bibliyografi estatistik oswa bibliyometri. J. Dokiman. 25 (4), 348–349.
Pudelko, R., Stuczynski, T., Borzecka-Walker, M., 2012. Konvnab nan yon machin ayeryen san ekipe (UAV) pou evalyasyon an nan jaden eksperimantal ak rekòt. Agrikilti 99 (4), 431–436.
Puri, V., Nayyar, A., Raja, L., 2017. Agrikilti dron: yon zouti modèn nan agrikilti presizyon. J. Statis. Jere. Syst. 20 (4), 507–518.
Radoglou-Grammatikis, P., Sarigiannidis, P., Lagkas, T., Moscholios, I., 2020. Yon konpilasyon aplikasyon UAV pou agrikilti presizyon. Konpitè. Netw. 172,
107148 https://doi.org/10.1016/j.comnet.2020.107148.
Ramesh, KV, Rakesh, V., Prakasa Rao, EVS, 2020. Aplikasyon gwo done analytics ak entèlijans atifisyèl nan rechèch agronomi. Endyen J. Agron. 65 (4), 383–395.
Raparelli, E., Bajocco, S., 2019. Yon analiz bibliyometrik sou itilizasyon veyikil ayeryen san ekipe nan syans agrikòl ak forè. Ent. J. Remote Sens. 40 (24),
9070–9083. https://doi.org/10.1080/01431161.2019.1569793.
Rasmussen, J., Nielsen, J., Garcia-Ruiz, F., Christensen, S., Streibig, JC, Lotz, B., 2013.
Itilizasyon potansyèl ti sistèm avyon san ekipe (UAS) nan rechèch raje. Raje Res. 53 (4), 242–248.
Rasmussen, J., Ntakos, G., Nielsen, J., Svensgaard, J., Poulsen, RN, Christensen, S., Èske endis vejetasyon ki sòti nan kamera konsomatè-klas ki monte sou
UAVs ase serye pou evalye simityè eksperimantal? Lajan ewo. J. Agron. 74, 75–92. https://doi.org/10.1016/j.eja.2015.11.026.
Rejeb, A., Rejeb, K., Abdollahi, A., Zailani, S., Iranmanesh, M., Ghobakhloo, M., 2022. Digitalization in food supply chains: a bibliometric review and key-route main path
analiz. Dirab 14 (1), 83. https://doi.org/10.3390/su14010083.
Rejeb, A., Rejeb, K., Simske, SJ, Treiblmaier, H., 2021a. Drones pou jesyon chèn ekipman ak lojistik: yon revizyon ak ajanda rechèch. Ent. J. Lojis. Res. Appl.
1–24. https://doi.org/10.1080/13675567.2021.1981273.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021b. Teknoloji Blockchain nan lojistik ak jesyon chèn ekipman pou: yon revizyon bibliyometrik. Lojistik 5 (4), 72.
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021c. Dron imanitè: yon revizyon ak rechèch ajanda. Entènèt bagay 16, 100434. https://doi.org/10.1016/j.
iot.2021.100434.
Rejeb, A., Treiblmaier, H., Rejeb, K., Zailani, S., 2021d. Rechèch Blockchain nan swen sante: yon revizyon bibliyometrik ak tandans rechèch aktyèl yo. J. nan Done, Inf. epi
Jere. 3 (2), 109–124.
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020. Rechèch Entènèt bagay nan jesyon chèn ekipman ak lojistik: yon analiz bibliyometrik. Entènèt
nan Bagay 12, 100318.
ReportLinker, 2021. Mache mondyal dron agrikilti pou rive nan 15.2 milya dola ameriken nan Sal Nouvèl YearGlobeNewswire. https://www.globenewswire.com/news-release/2021/08/10/2277986/0/en/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- Ane-2027.html.
Ribeiro-Gomes, K., Hernandez-L ´ opez, ´ D., Ortega, JF, Ballesteros, R., Poblete, T., Moreno, MA, 2017. Uncooled kamera tèmik kalibrasyon ak optimize nan la
pwosesis fotogrametri pou aplikasyon UAV nan agrikilti. Detèktè (Swis) 17 (10). https://doi.org/10.3390/s17102173.
Rivera, MA, Pizam, A., 2015. Avans nan rechèch Ospitalite: "De Rodney Dangerfield pou Aretha Franklin". Ent. J. Contempor. Lopital. Jere. 27 (3),
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
Roldan, ´ JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. Mini-UAV ki baze sou sistèm sansoryèl pou mezire varyab anviwònman an nan sèr. Detèktè 15 (2), 3334–3350. https://doi.org/10.3390/s150203334.
Rozenberg, G., Kent, R., Blank, L., 2021. UAV pou konsomatè yo itilize pou detekte ak analize modèl distribisyon espasyal raje nan fen sezon nan jaden zonyon komèsyal yo. Precis. Agrik. 22 (4), 1317–1332. https://doi.org/10.1007/s11119-021-09786-y.
Saari, H., Pellikka, I., Pesonen, L., Tuominen, S., Heikkila, ¨ J., Holmlund, C., Makynen, ¨ J., Ojala, K., Antila, T., 2011. Unmanned machin ayeryen (UAV) opere sistèm kamera espèk pou aplikasyon pou forè ak agrikilti. Kontinye. SPIE – Ent. Soc. Opt. Eng. 8174 https://doi.org/10.1117/12.897585.
Sah, B., Gupta, R., Bani-Hani, D., 2021. Analiz de baryè pou aplike lojistik abèy. Ent. J. Lojis. Res. Appl. 24 (6), 531–550. https://doi.org/10.1080/
13675567.2020.1782862.
Saha, AK, Saha, J., Ray, R., Sircar, S., Dutta, S., Chattopadhyay, SP, & Saha, HN, abèy ki baze sou IOT pou amelyore kalite rekòt nan jaden agrikòl. Nan SH
N. Chakrabarti S. (Ed.), 2018 IEEE 8th Anyèl Computing ak Kominikasyon Atelye ak Konferans, CCWC 2018 (Vols. 2018-Janvye, pp. 612-615). Enstiti
of Electrical and Electronics Engineers Inc doi: 10.1109/CCWC.2018.8301662.
Sai Vineeth, KV, Vara Prasad, YR, Dubey, SR, Venkataraman, H., 2019. LEDCOM: yon nouvo ak efikas kominikasyon ki baze sou dirije pou agrikilti presizyon. IEEE Konf. Info. Komin. Teknoloji. 2019, 1–5. https://doi.org/10.1109/CICT48419.2019.9066177.
Salamí, E., Barrado, C., Pastor, E., 2014. Eksperyans vòl UAV aplike nan deteksyon aleka nan zòn vejetasyon yo. Remote Sensing 6 (11), 11051–11081. https://doi.org/10.3390/rs61111051.
Sankaran, S., Khot, LR, Espinoza, CZ, Jarolmasjed, S., Sathuvalli, VR, Vandemark, GJ, Miklas, PN, Carter, AH, Pumphrey, MO, Knowles, NRN, Pavek, MJ, 2015.
Ba-altitid, gwo rezolisyon sistèm D ayeryen pou ranje ak fenotip rekòt jaden: yon revizyon. Lajan ewo. J. Agron. 70, 112–123. https://doi.org/10.1016/j.
eja.2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017. Wo-rezolisyon UAV ki baze sou tèmik D pou estime a
varyasyon enstantane ak sezon an nan eta dlo plant nan yon jaden rezen. Agrik. Jere dlo. 183, 49–59. https://doi.org/10.1016/j.agwat.2016.08.026.
Sarli, CC, Dubinsky, EK, Holmes, KL, 2010. Beyond sitasyon analiz: Yon modèl pou evalyasyon enpak rechèch. J. Med. Bibliyotèk Asoc. : JMLA 98 (1), 17–23. https://doi.org/10.3163/1536-5050.98.1.008.
Schaepman, ME, Ustin, SL, Plaza, AJ, Painter, TH, Verrelst, J., Liang, S., 2009. Syans sistèm Latè ki gen rapò ak espektroskopi D '-yon evalyasyon. Remote Sens. Environ. 113, S123–S137.
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016. Siveyans paramèt agronomi nan rekòt ble sezon fredi ak UAV pri ki ba
simagri. Remote Sensing 8 (9). https://doi.org/10.3390/rs8090706.
Schmale III, DG, Dingus, BR, Reinholtz, C., 2008. Devlopman ak aplikasyon yon veyikil ayeryen otonòm san ekipe pou echantiyon aerobyolojik egzak pi wo a.
jaden agrikòl. J. Field Rob. 25 (3), 133–147. https://doi.org/10.1002/rob.20232.
Shadrin, D., Menshchikov, A., Somov, A., Bornemann, G., Hauslage, J., Fedorov, M.,
Pèmèt agrikilti presizyon atravè deteksyon entegre ak entèlijans atifisyèl. IEEE Trans. Enstrim. Meas. 69 (7), 4103–4113.
Shakhatreh, H., Sawalmeh, AH, Al-Fuqaha, A., Dou, Z., Almaita, E., Khalil, I.,
Othman, NS, Khreishah, A., Guizani, M., 2019. Machin ayeryen san ekipe (UAVs): yon sondaj sou aplikasyon sivil ak defi rechèch kle. Aksè IEEE 7,
48572–48634. https://doi.org/10.1109/ACCESS.2019.2909530.
Shakoor, N., Northrup, D., Murray, S., Mockler, TC, 2019. Gwo done agrikilti kondwi: gwo done analytics nan elvaj plant, jenomik, ak itilizasyon teledeteksyon.
teknoloji pou avanse pwodiktivite rekòt. Plant Phenome J. 2 (1), 1-8.
Sharma, BK, Chandra, G., Mishra, VP, 2019. Analiz Konparatif ak Enplikasyon UAV ak AI nan Envestigasyon Forensic. Nan: Pwosedi – 2019 Amity International
Konferans sou entèlijans atifisyèl. https://doi.org/10.1109/AICAI.2019.8701407.
Sharma, R., Shishodia, A., Gunasekaran, A., Min, H., Munim, ZH, 2022. Wòl entèlijans atifisyèl nan jesyon chèn ekipman pou: kat teritwa a. Ent. J.
Prod. Res. 1–24. https://doi.org/10.1080/00207543.2022.2029611.
Shi, Y., Thomasson, JA, Murray, SC, Pugh, NA, Rooney, WL, Shafian, S., Rajan, N., Rouze, G., Morgan, CLS, Neely, HL, Rana, A., Bagavathiannan , MV,
Henrickson, J., Bowden, E., Valasek, J., Olsenholler, J., Bishop, MP, Sheridan, R., Putman, EB, Popescu, S., Burks, T., Cope, D., Ibrahim, A., McCutchen, BF,
Baltensperger, DD, Avant, RV, Vidrine, M., Yang, C., Zhang, J., 2016. Machin ayeryen san ekipe pou fenotip segondè-debi ak rechèch agronomik. PLoS YONN
11 (7), e0159781.
Shuai, G., Martinez-Feria, RA, Zhang, J., Li, S., Price, R., Basso, B., 2019. Kaptire eterojenite kanpe mayi atravè zòn sede-estabilite lè l sèvi avèk Unmanned Aerial
Machin (UAV). Detèktè 19 (20), 4446. https://doi.org/10.3390/s19204446.
Small, H., 1973. Ko-sitasyon nan literati syantifik la: yon nouvo mezi nan relasyon ki genyen ant de dokiman. J. Am. Soc. Info. Sci. 24 (4), 265–269.
Small, H., Rorvig, ME, Lunin, LF, 1999. Vizyalize syans pa kat sitasyon. J. Am. Soc. Info. Sci. 50 (9), 799–813.
Soares, VHA, Ponti, MA, Gonçalves, RA, Campello, RJGB, 2021. Konte bèt nan bwa ak imaj ayeryen jeolokalize nan gwo patiraj. Konpitè. Elektwon. Agrik. 189, 106354 https://doi.org/10.1016/j.compag.2021.106354.
Srivastava, K., Pandey, PC, Sharma, JK, 2020. Yon apwòch pou optimize wout nan aplikasyon pou agrikilti presizyon lè l sèvi avèk dron. Drones 4 (3), 58. https://doi.org/ 10.3390/drones4030058.
Stafford, JV, 2000. Aplike agrikilti presizyon nan 21yèm syèk la. J. Agric. Eng. Res. 76 (3), 267–275.
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018. Evalyasyon sechrès ble pa simagri deteksyon aleka lè l sèvi avèk machin ayeryen san ekipe. Nan 2018 37yèm Konferans kontwòl Chinwa (CCC).
Su, J., Liu, C., Coombes, M., Hu, X., Wang, C., Xu, X., Li, Q., Guo, L., Chen, W.-H., 2018. Siveyans rouye jòn ble lè w aprann nan simagri ayeryen miltispektral UAV.
Konpitè. Elektwon. Agrik. 155, 157–166. https://doi.org/10.1016/j. konpag.2018.10.017.
Su, Y., Wang, X., 2021. Inovasyon nan jesyon ekonomik agrikòl nan pwosesis pou konstwi agrikilti entelijan pa done gwo. Enfòmatik dirab. Enf. Syst. 31, 100579 https://doi.org/10.1016/j.suscom.2021.100579.
Sullivan, DG, Fulton, JP, Shaw, JN, Bland, GL, 2007. Evalye sansiblite yon sistèm ayeryen san ekipe tèmik enfrawouj pou detekte estrès dlo nan yon canopy koton. Trans. ASABE 50 (6), 1955–1962.
Sumesh, KC, Ninsawat, S., Som-ard, J., 2021. Entegrasyon endèks vejetasyon ki baze sou RGB, modèl sifas rekòt ak apwòch analiz imaj ki baze sou objè pou estimasyon pwodiksyon kann lè l sèvi avèk veyikil ayeryen san ekipe. Konpitè. Elektwon. Agrik. 180, 105903 https://doi.org/10.1016/j.compag.2020.105903.
Suomalainen, J., Anders, N., Iqbal, S., Franke, J., Wenting, P., Bartholomeus, H., Becker, R., Kooistra, L., 2013. Yon sistèm kat jeyografik ipèrspektral ki lejè pou
veyikil ayeryen san ekipe—premye rezilta yo. Nan: 2013 5yèm Atelye sou Imaj Hyperspectral ak Pwosesis Siyal: Evolisyon nan Remote Sensing (WHISPERS), pp. 1–4. https://doi.org/10.1109/WHISPERS.2013.8080721.
Suomalainen, J., Anders, N., Iqbal, S., Roerink, G., Franke, J., Wenting, P., Hünniger, D., Bartholomeus, H., Becker, R., Kooistra, L., 2014. Yon hyperspectral ki lejè
sistèm kat ak chèn pwosesis fotogrametrik pou machin ayeryen san ekipe. Deteksyon Remote 6 (11), 11013–11030. https://doi.org/10.3390/
rs61111013.
Syeda, IH, Alam, MM, Illahi, U., Su'ud, MM, 2021. Estrateji kontwòl avanse lè l sèvi avèk pwosesis imaj, UAV ak AI nan agrikilti: Yon revizyon. Mondyal J. Eng. 18 (4),
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
Tahai, A., Rigsby, JT, 1998. Pwosesis enfòmasyon lè l sèvi avèk sitasyon pou mennen ankèt sou enfliyans jounal nan kontablite. Enf. Pwosesis. Jere. 34 (2–3), 341–359.
Tang, Y., Dananjayan, S., Hou, C., Guo, Q., Luo, S., He, Y., 2021. Yon sondaj sou rezo 5G ak enpak li sou agrikilti: defi ak opòtinite. Konpitè.
Elektwon. Agrik. 180, 105895 https://doi.org/10.1016/j.compag.2020.105895.
Tantalaki, N., Souravlas, S., Roumeliotis, M., 2019. Done-kondwi pran desizyon nan agrikilti presizyon: ogmantasyon nan gwo done nan sistèm agrikòl. J. Agric. Enfòmasyon sou Manje.
20 (4), 344-380.
Tao, H., Feng, H., Xu, L., Miao, M., Yang, G., Yang, X., Fan, L., 2020. Estimasyon pwodiksyon an ak wotè plant nan ble sezon fredi lè l sèvi avèk UAV- ki baze sou imaj ipèspektral.
Detèktè 20 (4), 1231.
Techy, L., Schmale III, DG, Woolsey, CA, 2010. Kowòdone echantiyon aerobyolojik nan yon patojèn plant nan atmosfè ki pi ba a lè l sèvi avèk de veyikil ayeryen otonòm san ekipe. J. Field Rob. 27 (3), 335–343. https://doi.org/10.1002/rob.20335.
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020. Deteksyon ak klasifikasyon ensèk nuizib soya lè l sèvi avèk aprantisaj pwofon
ak imaj UAV. Konpitè. Elektwon. Agrik. 179, 105836.
Thamm, H.-P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013. Itilizasyon UAS pou Evalye Sistèm Agrikòl nan YON marekaj nan Tanzani nan— Ak WetSeason pou Agrikilti Dirab ak Bay Ground Verite pou Done Terra-Sar X. Nan: ISPRS – Achiv Entènasyonal Fotogrametri, Teledeteksyon ak Syans Enfòmasyon Espasyal, pp. 401–406. https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013.
Thelwall, M., 2008. Bibliometri pou webometrik. J. Info. Sci. 34 (4), 605–621.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Pena, ˜ JM, 2015. Yon metòd otomatik ki baze sou objè pou seuil optimal nan imaj UAV: aplikasyon pou deteksyon vejetasyon nan rekòt èrbeuz. Konpitè. Elektwon. Agrik. 114, 43–52. https://doi.org/10.1016/j.compag.2015.03.019.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Serrano, N., Arquero, O., Pena, ˜ JM, Hassan, QK, 2015. Siveyans 3-D wo-debi nan plantasyon pye bwa agrikòl ak Teknoloji UAV (Unmanned Aerial Vehicle). PLoS YON 10 (6), e0130479.
Torres-Sanchez, ´ J., Pena, ˜ JM, de Castro, AI, Lopez-Granados, ´ F., 2014. Katografik milti-tanporèl nan fraksyon vejetasyon nan jaden ble kòmansman sezon lè l sèvi avèk imaj ki soti nan UAV. Konpitè. Elektwon. Agrik. 103, 104–113. https://doi.org/10.1016/j. konpag.2014.02.009.
Tsouros, DC, Bibi, S., Sarigiannidis, PG, 2019. Yon revizyon sou aplikasyon UAV ki baze sou pou agrikilti presizyon. Enfòmasyon (Swis) 10 (11). https://doi.org/10.3390/info10110349.
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020. Optimize planifikasyon vòl abèy pou mezire estrikti rekòt pye bwa ortikol. ISPRS J. Photogramm.
Remote Sens 160, 83–96. https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis, A., Katsoulas, N., Bartzanas, T., Kittas, C., 2017. Entènèt bagay yo nan agrikilti, dènye pwogrè ak defi nan lavni. Biosyst. Eng. 164, 31–48.
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
Uddin, A., Singh, VK, Pinto, D., Olmos, I., 2015. Kat jeyografik syantometrik rechèch syans òdinatè nan Meksik. Syantometrik 105 (1), 97–114.
Nasyonzini, 2019. World population perspectives 2019. https://population.un.org/wpp/ (Konsève sou 15/04/2022).
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. Karakterizasyon nan rizyè diri pa yon sistèm detèktè ipèsspektral miniature UAVmounted. IEEE J. Sel. Top. Appl. Latè Obs.
Remote Senses 6 (2), 851–860. https://doi.org/10.1109/JSTARS.2013.2250921. van der Merwe, D., Burchfield, DR, Witt, TD, Price, KP, Sharda, A., 2020. Drones nan
agrikilti. Adv. Agron. 162, 1–30.
Velusamy, P., Rajendran, S., Mahendran, RK, Naseer, S., Shafiq, M., Choi, J.-G., 2022.
Machin ayeryen san ekipe (UAV) nan agrikilti presizyon: aplikasyon ak defi. Enèji 15 (1), 217. https://doi.org/10.3390/en15010217.
Ventura, D., Bonifazi, A., Gravina, MF, Belluscio, A., Ardizzone, G., 2018. Kat ak klasifikasyon nan abita marin ki sansib pou ekolojik lè l sèvi avèk Unmanned Aerial
Imaj machin (UAV) ak analiz imaj ki baze sou objè (OBIA). Teledeteksyon 10 (9), 1331. https://doi.org/10.3390/rs10091331.
Verger, A., Vigneau, N., Ch´eron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014. Endis zòn vèt ki soti nan yon sistèm ayeryen san ekipe sou rekòt ble ak kolza. . Remote Sens. Environ. 152, 654–664. https://doi.org/10.1016/j.rse.2014.06.006.
Von Bueren, SK, Burkart, A., Hueni, A., Rascher, U., Tuohy, MP, Yule, IJ, 2015. Deplwaye kat detèktè optik ki baze sou UAV sou savann: defi ak
limit. Biogeosciences 12 (1), 163-175. https://doi.org/10.5194/bg-12-163-2015.
Vuran, MC, Salam, A., Wong, R., Irmak, S., 2018. Entènèt bagay anba tè nan agrikilti presizyon: aspè achitekti ak teknoloji. Ad Hoc Netw. 81,
160–173. https://doi.org/10.1016/j.adhoc.2018.07.017.
Wamba, SF, Queiroz, MM, 2021. Responsab entèlijans atifisyèl kòm yon engredyan sekrè pou sante dijital: analiz bibliyometrik, insights, ak direksyon rechèch.
Info. Syst. Devan. 1–16.
Wang, L., Zhang, G., Wang, Z., Liu, J., Shang, J., Liang, L., 2019. Bibliometrik analiz de tandans rechèch remote sensing nan siveyans kwasans rekòt: Yon etid ka nan Lachin. Deteksyon Remote 11 (7). https://doi.org/10.3390/rs11070809.
White, HD, Griffith, BC, 1981. Cocitation otè: Yon mezi literati nan estrikti entelektyèl. J. Am. Soc. Info. Sci. 32 (3), 163–171.
Xiang, H., Tian, L., 2011. Devlopman nan yon pri ki ba agrikòl sistèm deteksyon remote ki baze sou yon otonòm machin ayeryen san ekipe (UAV). Biosyst. Eng. 108 (2), 174–190. https://doi.org/10.1016/j.biosystemseng.2010.11.010.
Xie, C., Yang, C., 2020. Yon revizyon sou karakteristik fenotip wo-debi plant lè l sèvi avèk detèktè UAV ki baze sou. Konpitè. Elektwon. Agrik. 178, 105731 https://doi.org/10.1016/j.
konpag.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. Veyikil ayeryen san ekipe pou aplikasyon pou deteksyon aleka-yon revizyon. Deteksyon Remote 11 (12). https://doi.org/10.3390/
rs11121443.
Yeom, S., 2021. Deplase moun swiv ak fo tras retire ak enfrawouj tèmik D pa yon multirotor. Drones 5 (3), 65. https://doi.org/10.3390/drones5030065.
Yue, J., Feng, H., Jin, X., Yuan, H., Li, Z., Zhou, C., Yang, G., Tian, Q., 2018. Yon konparezon nan estimasyon paramèt rekòt lè l sèvi avèk imaj soti nan UAV-monte
snapshot detèktè hyperspectral ak kamera dijital wo-definisyon. Teledeteksyon 10 (7), 1138. https://doi.org/10.3390/rs10071138.
Yue, J., Yang, G., Li, C., Li, Z., Wang, Y., Feng, H., Xu, B., 2017. Estimasyon ble sezon fredi anwo-tè byomass lè l sèvi avèk machin ayeryen san ekipe- ki baze sou snapshot
Capteur hyperspectral ak modèl wotè rekòt amelyore. Remote Sensing 9 (7). https://doi.org/10.3390/rs9070708.
Zahawi, RA, Dandois, JP, Holl, KD, Nadwodny, D., Reid, JL, Ellis, EC, 2015. Sèvi ak lejè machin ayeryen san ekipe pou kontwole rekiperasyon forè twopikal. Biol.
Konsèv. 186, 287–295. https://doi.org/10.1016/j.biocon.2015.03.031. Zamora-Izquierdo, MA, Santa, J., Martínez, JA, Martínez, V., Skarmeta, AF, 2019.
Platfòm IoT agrikilti entelijan ki baze sou edge ak cloud computing. Biosyst. Eng. 177,
4-17.
Zarco-Tejada, PJ, Diaz-Varela, R., Angileri, V., Loudjani, P., 2014. Kantifikasyon wotè pyebwa lè l sèvi avèk simagri rezolisyon trè wo akeri nan yon ayeryen san ekipe.
machin (UAV) ak otomatik 3D foto-rekonstriksyon metòd. Lajan ewo. J. Agron. 55, 89–99. https://doi.org/10.1016/j.eja.2014.01.004.
Zhang, C., Craine, WA, McGee, RJ, Vandemark, GJ, Davis, JB, Brown, J., Hulbert, SH, Sankaran, S., 2020. Fenotip imaj ki baze sou entansite flè nan rekòt sezon fre. Detèktè 20 (5), 1450. https://doi.org/10.3390/s20051450.
Zhang, C., Kovacs, JM, 2012. Aplikasyon an nan ti sistèm ayeryen san ekipe pou agrikilti presizyon: yon revizyon. Precis. Agrik. 13 (6), 693–712. https://doi.org/
10.1007/s11119-012-9274-5.
Zhang, L., Zhang, H., Niu, Y., Han, W., 2019. Kat estrès dlo mayi ki baze sou UAV miltispectral remote sensing. Teledeteksyon 11 (6), 605.
Zhang, X., Han, L., Dong, Y., Shi, Y., Huang, W., Han, L., Gonz´ alez-Moreno, P., Ma, H., Ye, H., Sobeih , T., 2019. Yon apwòch ki baze sou aprantisaj pwofon pou rouye jòn otomatik
deteksyon maladi soti nan imaj wo-rezolisyon ipèspèktral UAV. Teledeteksyon 11 (13), 1554.
Zhao, X., Zhang, J., Huang, Y., Tian, Y., Yuan, L., 2022. Deteksyon ak diskriminasyon nan maladi ak estrès ensèk nan plant te lè l sèvi avèk D 'ipèspektral konbine avèk analiz wavelet. Konpitè. Elektwon. Agrik. 193, 106717 https://doi.org/10.1016/j. konpag.2022.106717.
Zheng, A., Wang, M., Li, C., Tang, J., Luo, B., 2022. Entropi gide adaptasyon domèn advèsè pou segmantasyon semantik imaj ayeryen. IEEE Trans. G
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. Deteksyon nan fenoloji diri atravè analiz seri tan nan espèk ki baze sou tè. done endèks. Rekòt jaden Res. 198, 131–139. https://doi.org/10.1016/j.fcr.2016.08.027.
Zheng, J., Yang, W., 2018. Konsepsyon yon sistèm simen ak presizyon agrikilti ki baze sou detèktè san fil. Ent. J. Online Eng. 14 (05), 184.
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Solèy, Q., 2020. Analiz de chanjman wotè plant nan mayi pase nwit lan lè l sèvi avèk done UAV-LiDAR. Agrikilti 10 (5), 146. https://
doi.org/10.3390/agriculture10050146.
Zhou, S., Chai, X., Yang, Z., Wang, H., Yang, C., Solèy, T., 2021. Maize-IAS: Yon lojisyèl analiz imaj mayi ki sèvi ak aprantisaj pwofon pou fenotip plant gwo-debi. . Plant Methods 17 (1), 48. https://doi.org/10.1186/s13007-021-00747-0.
Zhou, X., Zheng, HB, Xu, XQ, Li, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017. Predi pwodiksyon grenn nan diri lè l sèvi avèk vejetasyon milti-tanporèl
endis ki soti nan simagri miltispektral ak dijital ki baze sou UAV. ISPRS J. Photogramm. Remote Sens. 130, 246–255. https://doi.org/10.1016/j.isprsjprs.2017.05.003.
Zhou, Y., Xie, Y., Shao, L., 2016. Simulation nan teknoloji debaz nan yon sistèm greenhousemonitoring ki baze sou yon rezo Capteur san fil. Ent. J. Online Eng. 12 (05),
43.
Zhou, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, EMT, 2021. Evalyasyon pou estrès dlo rekòt ak simagri tèmik enfrawouj nan agrikilti presizyon: yon revizyon
ak kandida nan lavni pou aplikasyon pou aprantisaj pwofon. Konpitè. Elektwon. Agrik. 182, 106019 https://doi.org/10.1016/j.compag.2021.106019.

{kind=link}