































{kind=link}
Pifò robo reyalize atrab ak tactile deteksyon atravè mwayen motè, ki ka twò ankonbran ak rijid. Yon gwoup Inivèsite Cornell te envante yon fason pou yon robo mou santi anviwònman li anndan, nan menm jan moun fè.
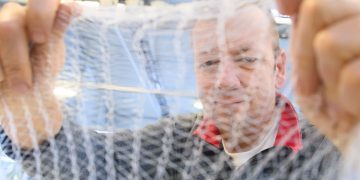
Yon gwoup ki te dirije pa Robert Shepherd, pwofesè asistan nan jeni mekanik ak ayewospasyal ak envestigatè prensipal nan Laboratwa Robotik òganik, te pibliye yon papye ki dekri kijan gid ond optik extensible aji kòm koub, elongasyon ak detèktè fòs nan yon men robotik mou.
Elèv doktora Huichan Zhao se otè prensipal nan "Optoelectronically innervated mou pwotèz men atravè Stretchable Optical Waveguides,” ki parèt nan premye edisyon Science Robotics. Papye a pibliye 6 desanm; te kontribiye tou etidyan doktora Kevin O'Brien ak Shuo Li, tou de nan laboratwa Shepherd la.
"Pifò robo jodi a gen detèktè sou deyò kò a ki detekte bagay ki soti nan sifas la," Zhao te di. "Detèktè nou yo entegre nan kò a, kidonk yo ka aktyèlman detekte fòs yo transmèt atravè epesè robo a, anpil tankou nou menm ak tout òganis fè lè nou santi doulè, pa egzanp."
Gid ond optik yo te itilize depi kòmansman ane 1970 yo pou plizyè fonksyon deteksyon, tankou tactile, pozisyon ak acoustic. Fabrikasyon te orijinèlman yon pwosesis konplike, men avenman sou 20 dènye ane yo nan litografi mou ak enprime 3-D te mennen nan devlopman nan detèktè elastomerik ki fasil pwodui ak enkòpore nan yon aplikasyon robotik mou.
Gwoup Shepherd te anplwaye yon pwosesis litografi mou kat etap pou pwodwi nwayo a (atravè limyè ki pwopaje), ak CLADDING (sifas ekstèn nan gid ond la), ki tou kay ki ap dirije a (dyòd ki emèt limyè) ak fotodyod la.
Plis men pwotèz la defòme, se plis limyè pèdi nan nwayo a. Sa a pèt varyab nan limyè, jan fotodyod la detekte, se sa ki pèmèt pwotèz la "santi" anviwònman li yo.
Shepherd te di: “Si pa gen okenn limyè ki te pèdi lè nou pliye pwotèz la, nou pa t ap jwenn okenn enfòmasyon sou eta a nan Capteur a. "Kantite pèt la depann de fason li koube."
Gwoup la te itilize pwotèz optoelektwonik li yo pou fè yon varyete travay, tankou atrab ak sonde pou tou de fòm ak teksti. Pi miyò, men an te kapab eskane twa tomat ak detèmine, pa tendres, ki te pi mi an.
Zhao te di ke teknoloji sa a gen anpil itilizasyon potansyèl pi lwen pase pwotèz, ki gen ladan robo bio-enspire, ke Shepherd te eksplore ansanm ak Mason Peck, pwofesè asosye nan jeni mekanik ak ayewospasyal, pou itilize nan eksplorasyon espas.
"Pwojè sa a pa gen okenn fidbak sansoryèl," Shepherd te di, refere li a kolaborasyon ak Peck, "men si nou te gen detèktè, nou ta ka kontwole an tan reyèl chanjman nan fòm pandan konbisyon an [atravè elektwoliz dlo] epi devlope pi bon sekans aksyon pou fè. li deplase pi vit."
Travay nan lavni sou gid ond optik nan robotik mou pral konsantre sou ogmante kapasite sansoryèl, an pati pa enprime 3-D fòm detèktè ki pi konplèks, ak enkòpore aprantisaj machin kòm yon fason pou dekouplage siyal ki soti nan yon kantite ogmante detèktè. "Kounye a," Shepherd te di, "li difisil pou lokalize kote yon touche soti."
Travay sa a te sipòte pa yon sibvansyon nan Air Force Office of Scientific Research, e li te fè sèvi ak la Etablisman Syans ak Teknoloji Cornell NanoScale ak nan Sant Cornell pou rechèch materyèl, tou de nan yo ki sipòte pa National Science Foundation.
- Tom Fleischman, Inivèsite Cornell